I’m having an issue while trying to maiden my hexacopter. I routed a frame out of CF and have installed a Pixhawk 6C, a T-Motor 8in1 55A ESC, a PM07 Power Module, and an Emlid M2 GPS. Along with an ELRS receiver and future desired peripherals.
I went through all of the documentation for setup, and have checked all the wiring connections at least 5 times.
I have motor signal wires going from Pixhawk I/O PWM output port → PM07 I/O Input port, and signal wires from the ESC inputs to each of the M1-M6 solder pads on the PM07. The ESC has outputs 1-6 soldered to each motor, 7-8 are unused. +±-CT are all not connected. Power is a heavy 10 gauge pair of wires from the ESC to the batteries (3x 6500mah 6s LiHV).
I have quality hardware that should just work. However I have the motors unexpectedly spin down with diminished power while hovering in Stabilize mode. There are no unexpected failsafes, no loose connections, nothing to show any issues. Here is a link to a video I took. Hexa Troubleshooting - YouTube
Change over to using the “FMU PWM Output” for MOT_PWM_TYPE,5 to work as expected, otherwise you are just using old fashioned PWM. You will also need to change the Servo outputs in MissionPlanner as per the attached screenshot (I only have 4 motors here, adjust to suit your copter) EDIT: and this SERVO_BLH_BDMASK,3840 - adjust to suit your motor connections
If you load the Pixhawk 6C Bi-directional DSHOT firmware you will have the ESC RPM data for this super-easy config of the Harmonic Notch filter:
INS_HNTCH_ENABLE,1
INS_HNTCH_MODE,3
INS_HNTCH_REF,1
Also set these:
INS_ACCEL_FILTER,10
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
BATT_FS_LOW_ACT,2 or 3
BATT_LOW_VOLT 21.6
MOT_SPIN_MIN,0.13
Then do a new test flight after checking the BLHELI settings and these AC params listed here. If you get some stable hover in Stabilise mode, try AltHold for a while, which will allow learning of the hover thrust value.
Thanks for the help! I have run into a couple problems trying to follow along with your post however.
The Pixhawk 6C -bl firmware hex always fails to flash for some reason. (Along with that, wouldn’t that only enable 4 of the 16 ports for telemetry?)
I’m uncertain which ports to use for dshot. I only recently became aware that not all 16 can do dshot. I have Pixhawk FMU outputs (1-6) connected to the PM07 FMU input, PM07 FMU output rail connected to each esc signal wire. Can I keep “servos” (in servo output tab) 1-6 as my motors?
I also added a couple of caps to the ESC to help with voltage spikes. I will configure the Bl_heli suite settings as soon as the hexa is put back together.
Thanks again for the help. Still trying to figure this out.
Ok, I did figure out the ports. I discovered that if I change the servo_x outputs from 1-6 over to 9-14, I have control of my motors. It also now displays correctly in the messages (RCOut: PWM:1-8 DS300:9-14 PWM:15-16)
The BL_heli passthrough worked correctly now too. I changed the settings per your advice.
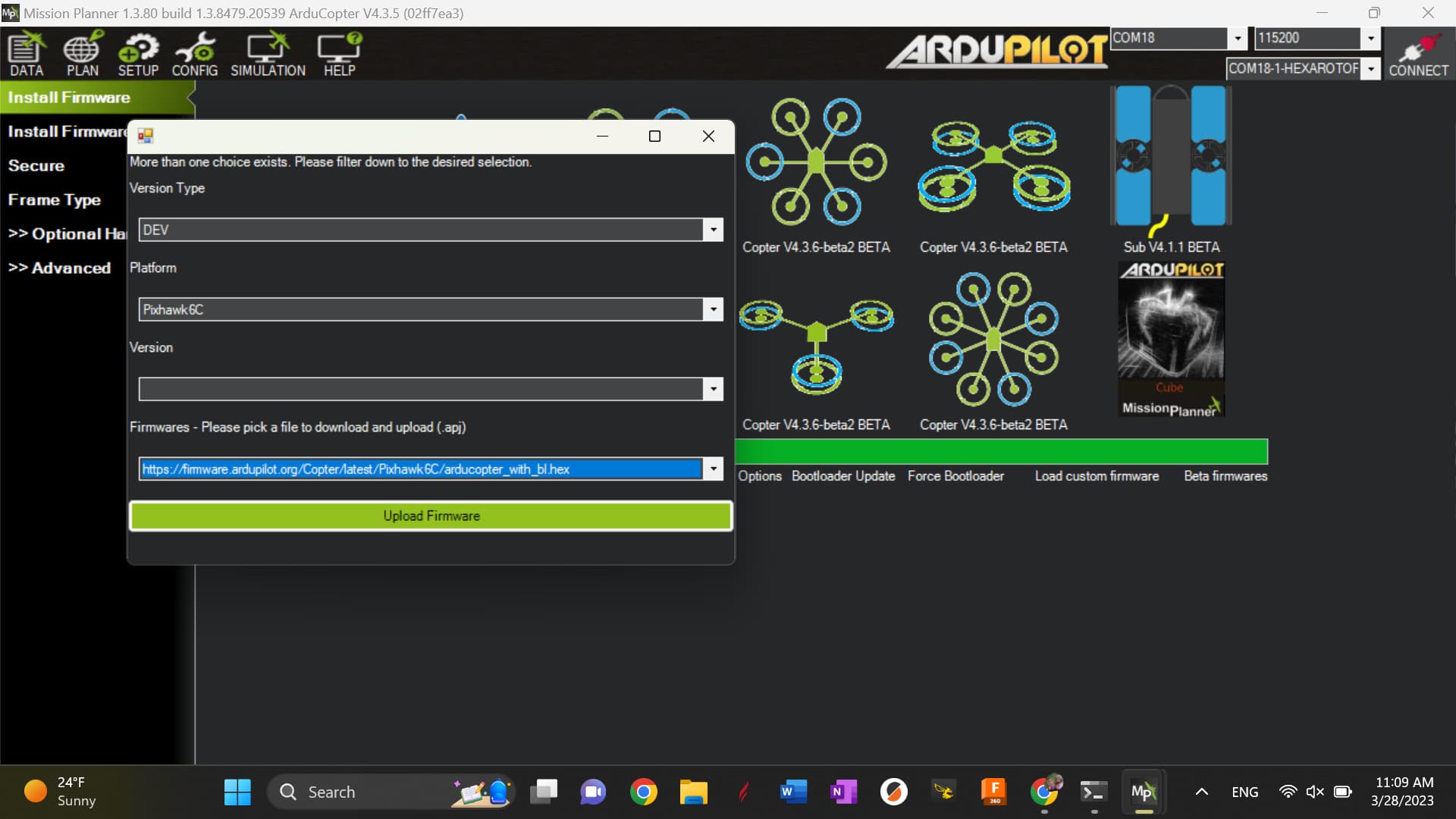
All that’s left is, how can I load Pixhawk 6C -bdshot/-bl firmware? And will this firmware allow telemetry for 6 motors, or just 4?
Thanks for the advice. I was able to find the .hex file, but after browsing around on the link you gave me, as well as the “all options” inside of mission planner firmware update page, all I could find was .hex. .apj appears to be missing for the Pixhawk 6c (with bdshot).
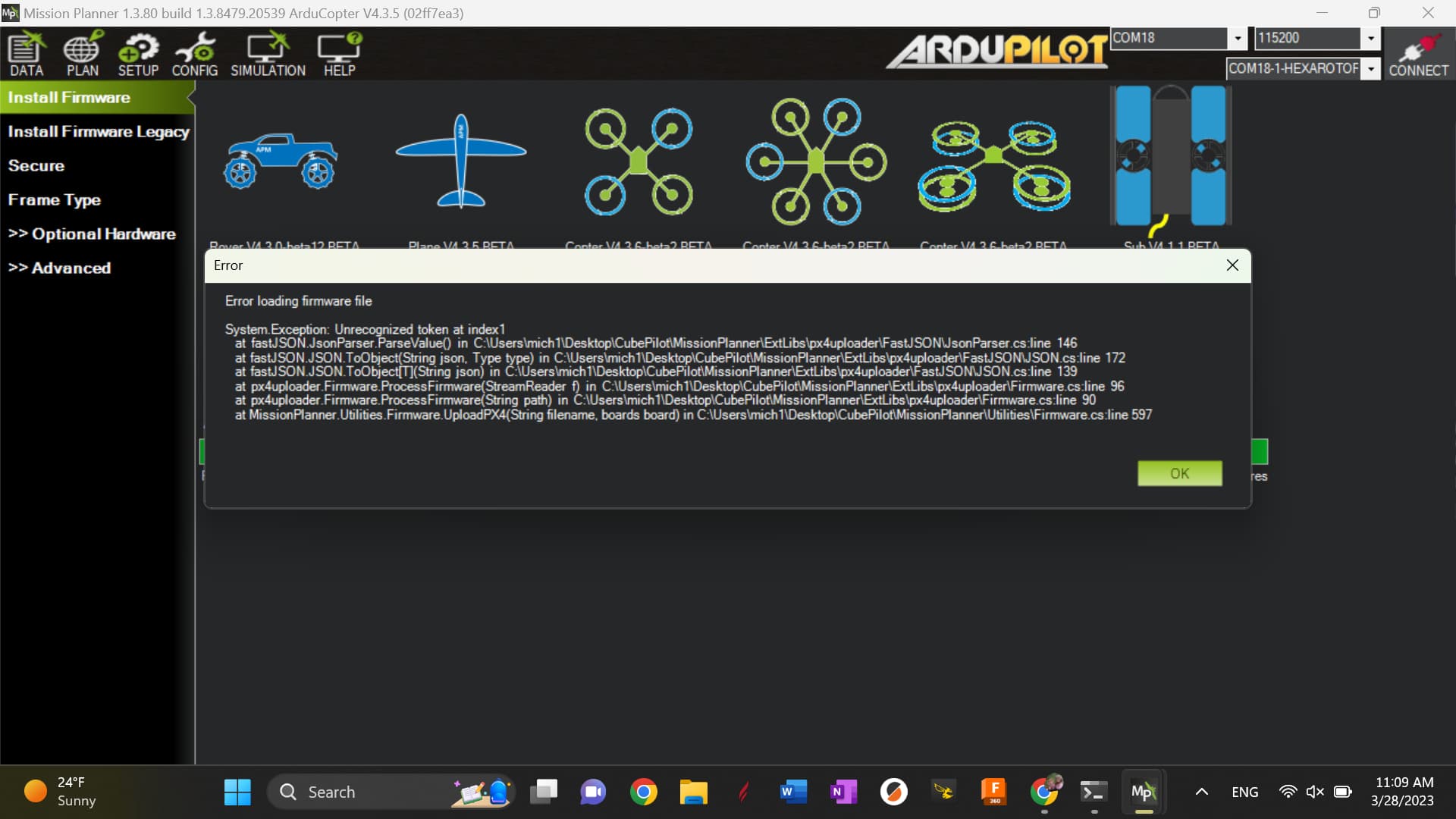
When I try to load the .hex it gives me an error. Screenshots attached.
If you could direct me to the .apj file I need it would be greatly appreciated! Or even if you were to attach it to your post.
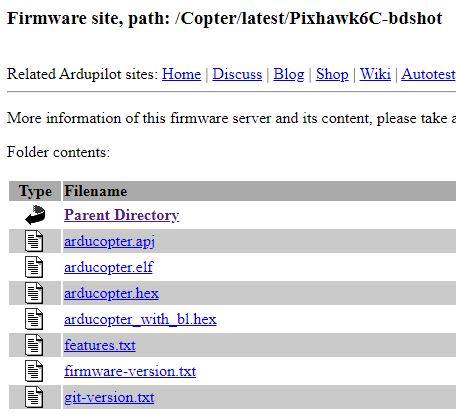
My apologies, I misunderstood. I didn’t realize the entire folder was for bdshot versions.
Thank you so much! We got the copter to maiden successfully today, I’ll install this firmware now so that we have telemetry for the future.
You guys are the best!
Just realize this is the Developer version of firmware so testing even at the beta level has not been done. But, if you want Bdshot with that FC it’s the only choice at the moment.