Hi all!
I’ve been working on a Tailsitter VTOL with no control surfaces, which uses the multicopter attitude rate controller for both hover and forward-flight modes. I’ve been analysing the code, and noted that despite the motor mixer expecting inputs in the range -1 ~ +1, it does not constrain the input to this range, and from what I could tell looking at the code, the rate controller does not constrain its output to this range either.
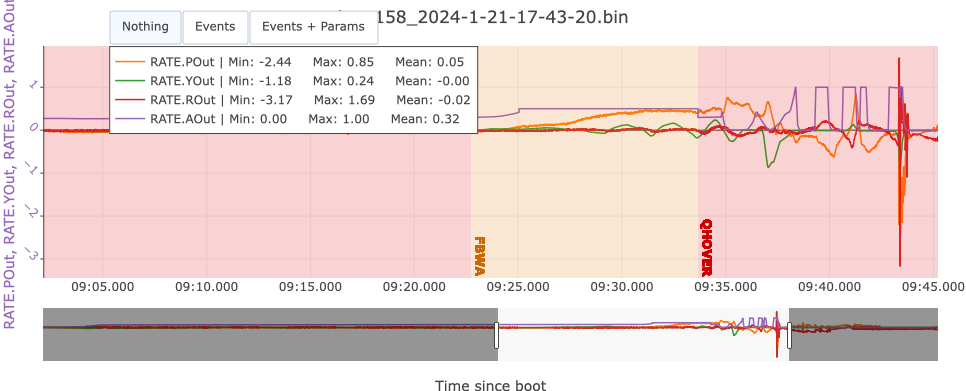
In fact, from a recent flight I had where after the FW->VTOL transition the aircraft was unable to stabilise, entering an uncontrolled descent, the rate output did in fact go outside this range:
Does this mean that in fact the rate output is not necessarily in the -1 to 1 range, it is simply then constrained to the available individual motor output in the motor mixer? Or am I missing something?