Hi,I made an unmanned ship with a diameter of 3M and realized the auto waypoint. Although it was not ideal, I was still improving. Now I want to make a second one, but I have two problems
I want to realize the anti-collision of these two ships through GPS positioning. I searched some parameters through mission planner, but I didn’t see relevant information. Maybe I missed it
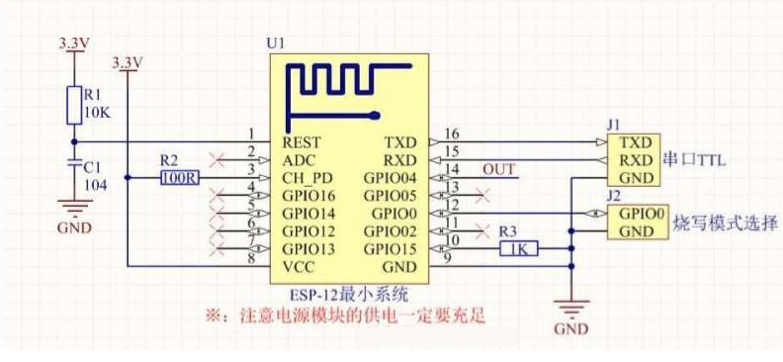
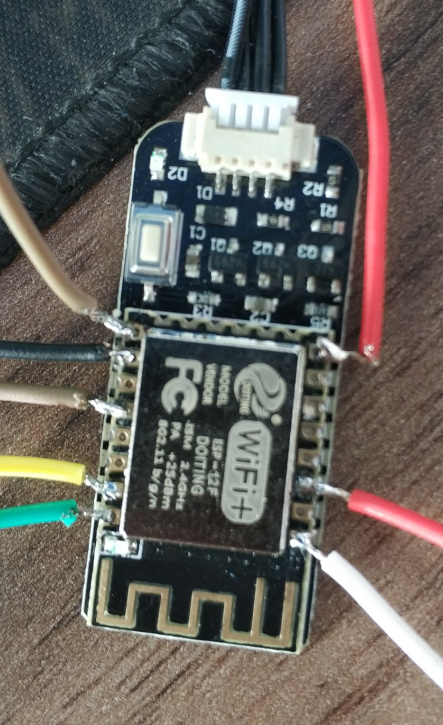
I want to build a networking through WiFi (the module has been bought, but haven’t arrived yet) and use the computer as the base station. The two ships are connected to the hot spots of the computer. Does this scheme works?
Thank you in advance
@rmackay9 Hi,I have learn a lot from your answers,Thank you very much.I find AVOID_MARGIN and AVOID_ENABLE parameters,the describtion of AVOID_MARGIN is to know distance from objecs,does the objecs contain another pixhawk’s GPS singal?
Thank you in advance
Today,I find the ADSB.Is the module to avoid business airplane?So I just find SRx_ADSB parameters in the ArduRover firmware.Is there any possibile to build a private ADSB system on the Mission Planner on the PC?just to make avoidance from each other which connected to the Mission Planner.
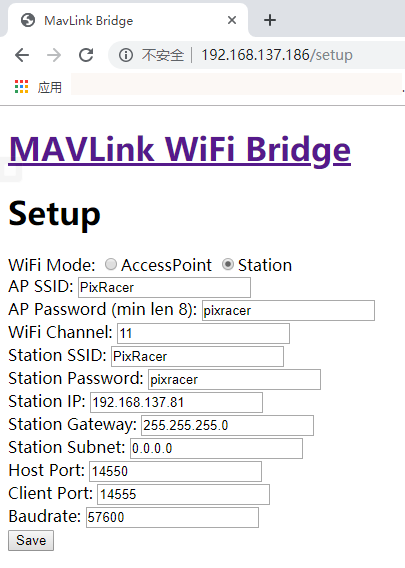
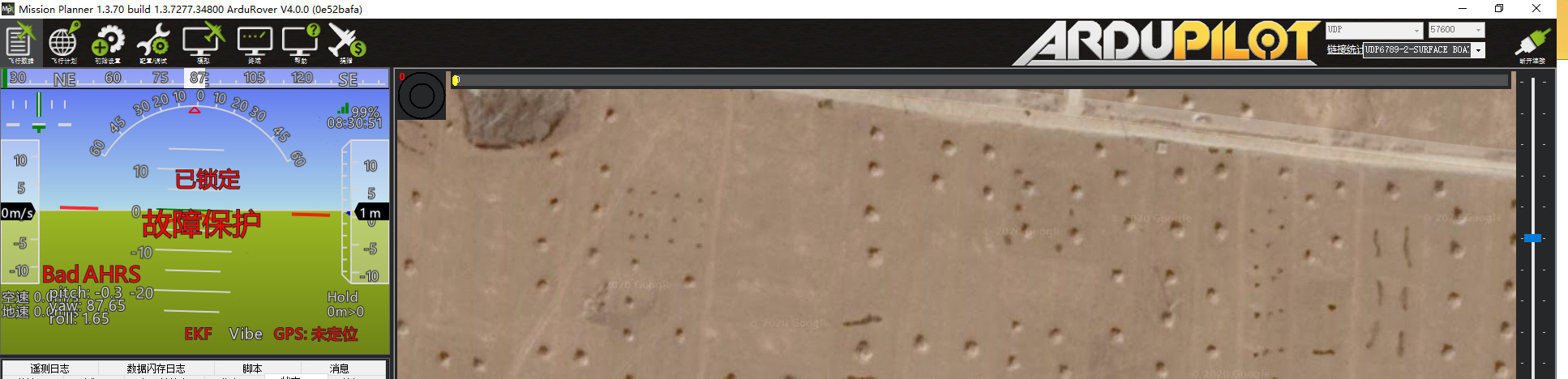
The firmware is successfully brushed in
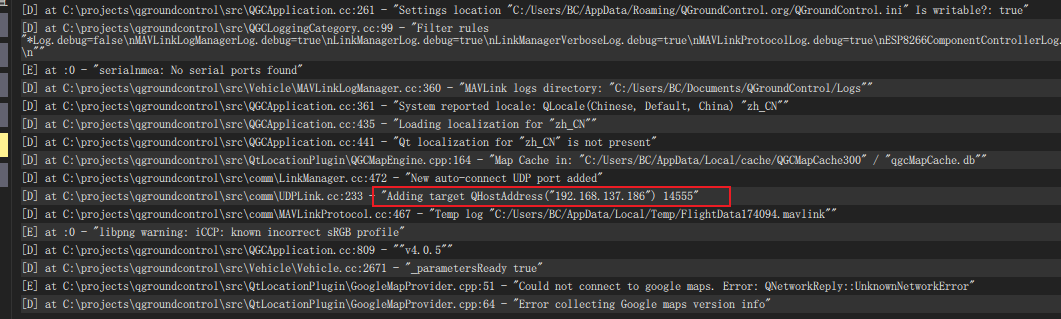
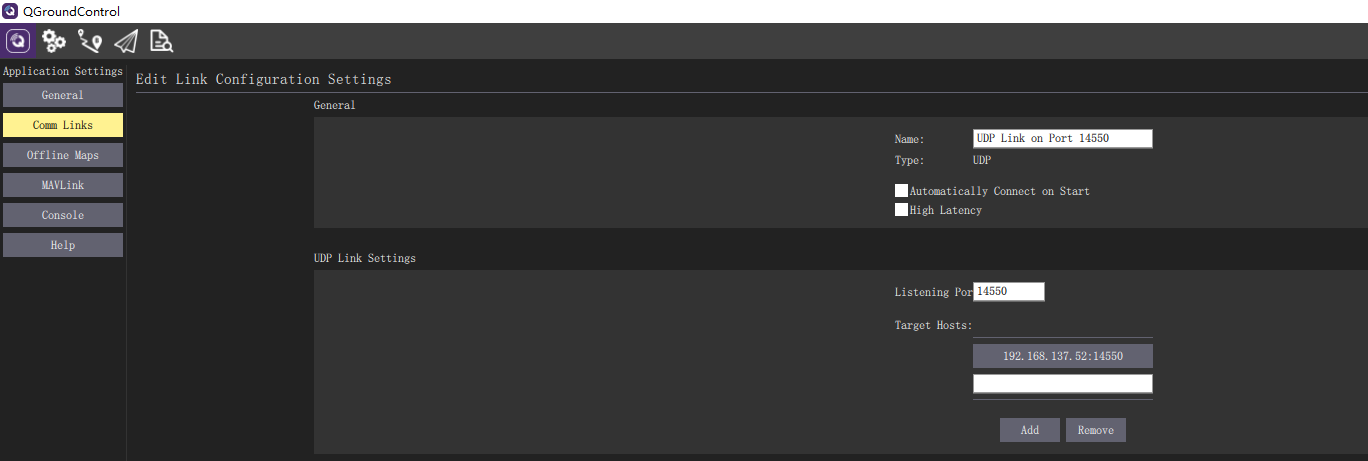
I can setup the parameters in the 192.168.4.1 in AP model,I change to the Station model and connected to the hot spots of PC,





 )
)