There is an efficiency metric already for the MSP displayport OSD. OSD1_EFF_EN. For some reason, it measures mAh/km (or mAh/mi) though, instead of the clearly superior wh/km. Of course it is super simple to do (amps * pack voltage) / km/h in the code, but for some reason, they implemented amps / km/h instead ![]() . Better than nothing though
. Better than nothing though ![]()
Hi, is there any way to move the HD OSD to the left and increase Y to 20 and x to about 50?
Currently OSD offsets don’t affect anything in HD mode. Running last night’s 4.4dev
I suppose the answer about mAh/km(or mi) was ‘we always done that like this and also this was a standard choice in Eagle Tree system or other ‘classic’ old Autopilot.’
Perhaps there is a way to push a merge request if we find time to do that ? But prior, it will be nice to know if developper had a good reason to choose this and they are agree to change this. I don’t like the idea to fork Ardupilot for such a reason.
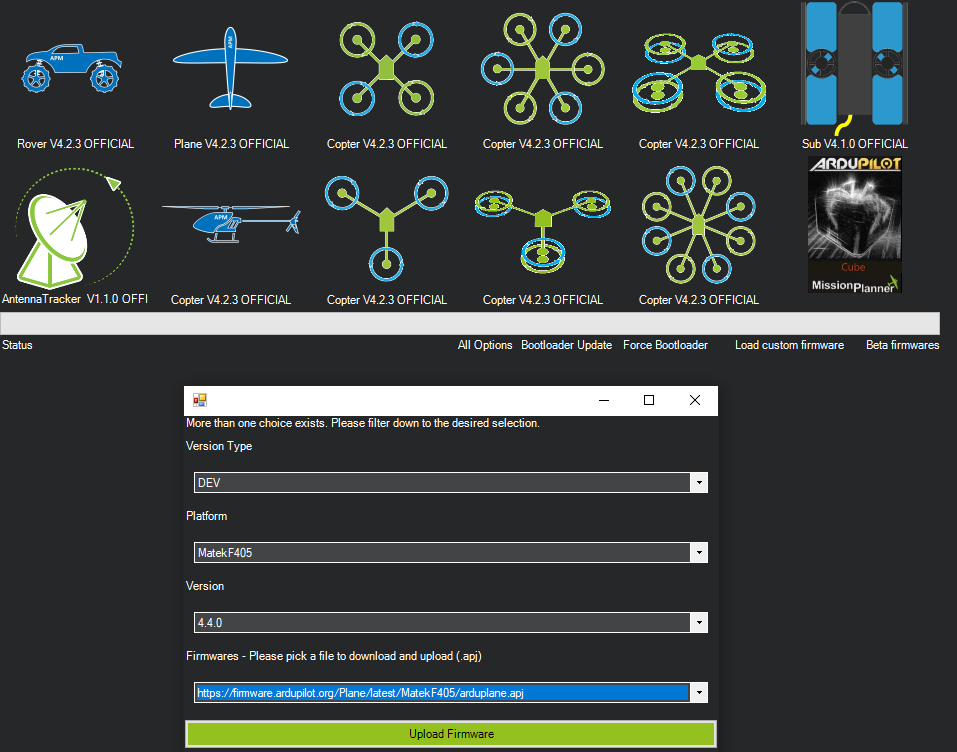
No more ‘Sending unknow message’ with ArduPlane V4.4.0dev (83efcc00). This is a great news. Fun fact I had a custom build launched this morning (12h ago) on custom.ardupilot. that is still in pending. But I discover that ‘all options’ in mission planner firmware page let to choose the version I want ![]() Nice
Nice
1 Like
uploaded Ye He we are cooking with gas thank you developers
1 Like
Thanks. Looks like I’ll just use X Y coordinates for now. MP beta updates haven’t addressed this issue. It’s been an issue forever so maybe I’ll submit a ticket to Michael Oborne.
Who can help me?
I can’t find where the problem is from the code.
Paul Kaup with STEM+C.
I am interested in joining this MSP protocol group. I am using the Matek F405wmn Flight controller with Arduplane and Missionplanner. Right now I am using analog on my rig, but would like to move over to DJI. Thank you…
The Benett webpage … https://stemplusc.org/the-benett/
Hi,
does anyone have WTFOS running in HD and can share the OSD parameters?
When a parameter is set to the 0,0 position it is not in the top left of the display. Is that correct?
1 Like
If anyone can help out. Thanks
@yaapu I got the Walksnail working on my goggles, but unable to get the OSD text to spread out. It’s more like On-Your-Face OSD. I tried both 4:3 and 16:9 aspect ratio. I can only move the text to the right side but that is all.
Defeats the definition of Canvas mode.
Any idea how I can move the text to the edges of the screen?
At Walksnail VRX Menu choose Settings → Display
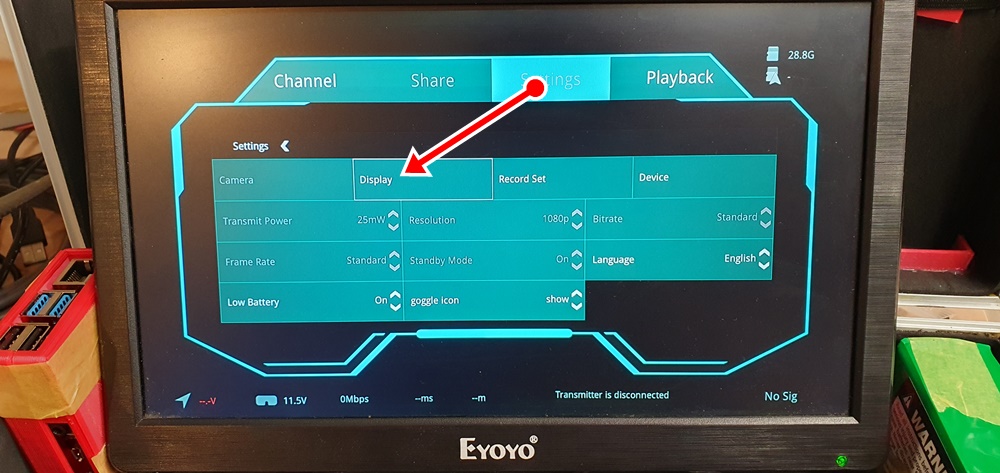
→ OSD-Position
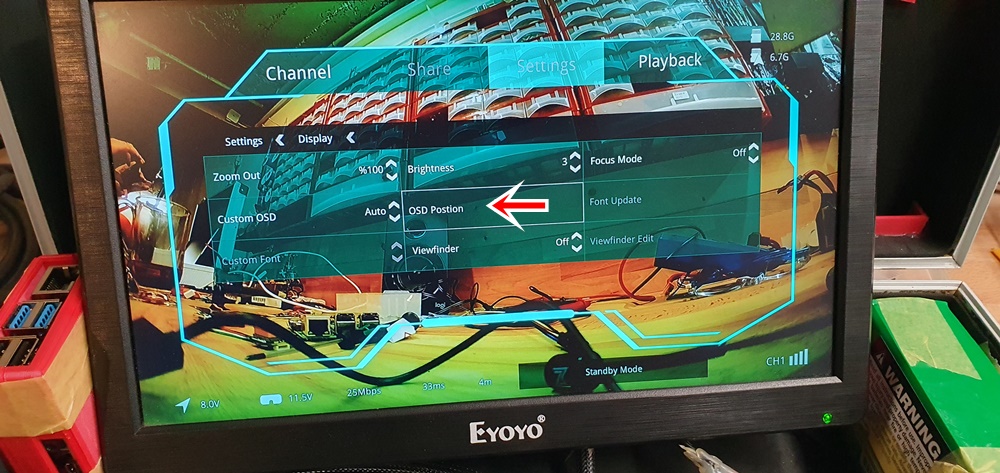
and with the Cursor you can move the left upper corner of the OSD-Area

Don’t forget to set OSD1_TXT_RES,1 (Textresolution 50 x 18)
Rolf
2 Likes
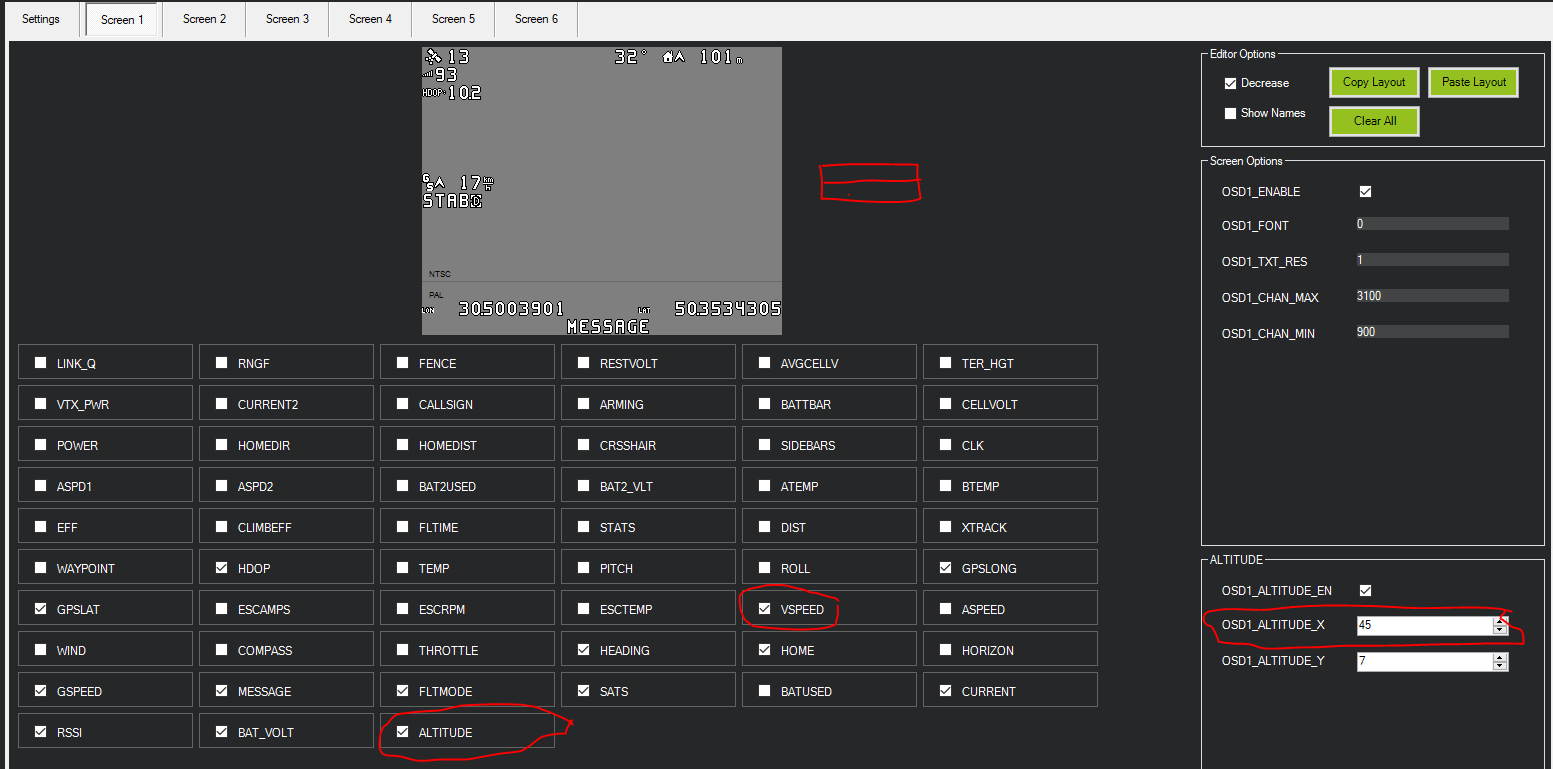
Thanks Rolf, works like a charm. @Michael_Oborne I had to move my right edge values to X=45 which makes them disappear from the MP OSD screen. Perhaps in the future MP OSD setup screen should be standardized for 16:9 and 4:3 aspect ratio.
Just a suggestion.
1 Like
@Rolf I got the plane up in the air today with stock FW (No WTFOS). After takeoff the OSD froze, not sure why but the video reception was ok.
The goggles (Walksnail Rx) recorded two types of files MP4 and OSD. I suppose I need https://knifa-develop.fpv.wtf/osd-overlay software to combine the two files, but it requires a Font file as well to run the software.
Any idea where this font file resides, or how do you enable font recording?
I was flying without an SD card in the Matek-F405 FC, could no SD card be the reason for OSD freezing up?
Hi Riz,
I am a complete newbie to Walksnail. I don’t know what could be the reason for the freezing. I use this program to render the OSD data: Releases · kirek007/ws-osd-py · GitHub
Rolf

@yaapu
When setting parameters for MSP Osd, does it requires specific sequence? E.g. set serialx first then Osd_type and so on?
Reason I am asking this question because my Osd was not working and the only thing I changed was the sequence of setting up parameters.
im not sure where to post this but looks like GitHub - BrushlessPower/BlHeli-Passthrough: Arduino Library and Examples for BlHeli Passtrough with ESP32 is dead and wondering if anyone knowledge on passthru can help me fork and revive this project i have been able to get as far as make it work with editing esc settings, just cant flash something goes wrong when i use the flash part on esc-configurator.com either way not sure but think this would be great to be able to flash my esc’s without having to get a flight controler out / have a spare one i can just use this prebuild to flash them and flash esc for my other projects that dont take 4 like my drone does anyway hope to hear back i feel the knowlege is here and active still anyway if anyone can let me know if they can help or sounds like a good project hit me up love to be involved
Is it somehow possible to control what raw telemetry data is transmitted via MSP? Can I customize the data that is transmitted via lua maybe?
Mat