I am trying to get my setup working with am mRo PixracerPro and ADIS16507 (from ARK Electronics).
I cloned the ardupilot repo and created a copy of […]/hwdef/mRoPixracerPro.
I then edited the hwdef.dat (only, since I wasn’t able to compile a bootloader for some reason), main changes:
#SPI6 EXTERNAL - IMU (ADIS)
PG13 SPI6_SCK SPI6
PG12 SPI6_MISO SPI6
PG14 SPI6_MOSI SPI6
#ADIS DRDY pin, originaly used as PWM(8)
PI6 DRDY_ADIS16507 INPUT GPIO(57)
define ADIS_DRDY_PIN 57
#ADIS nRST pin, originaly used as PWM(7)
PI5 nRST_ADIS OUTPUT HIGH GPIO(56)
I also commented out the 3 original PixracerPro IMU’s SPI and usage definitions. Complete hwdef.dat file
Problem is I am getting these errors (I do not know how to reproduce it effectively, since there are time the IMU is initializing and responding. Maybe something to do with ‘soft’ reboots without loosing power).
12/09/2023 15:14:05 : Config Error: fix problem then reboot
12/09/2023 15:14:03 : Config Error: INS: unable to initialise driver
I did see mRoNexus/hwdef-bl.dat that set PB1 nRST_ADIS OUTPUT LOW. Might be related…
Anyone can help or send some advises?
I have used PixracerPro with a couple of other lower grade IMUs the did not have a Reset pin successfully in the past few months.
Thanks
I’d rather compile my own firmware since I am testing changes to the code as well, I’ll give your files a shot just to see if it reproduces, can you share the hwdef and hwdef-bl too?
The CS is defined in the hwdef-bl as well, by default from mRo’s original files.
Connections are OK - data is flowing but after rebooting Ardupilot (sometimes) I’m getting the error messages. I also tried with reset pin not connected, no difference.
It seems to me that it is related to the bootloader, which I just cannot get to compile (which is a different issue because I cannon compile any bootloader even with the original definition files).
Update:
I managed to compile a bootloader and flash it to the board (not being able to compile was different issue).
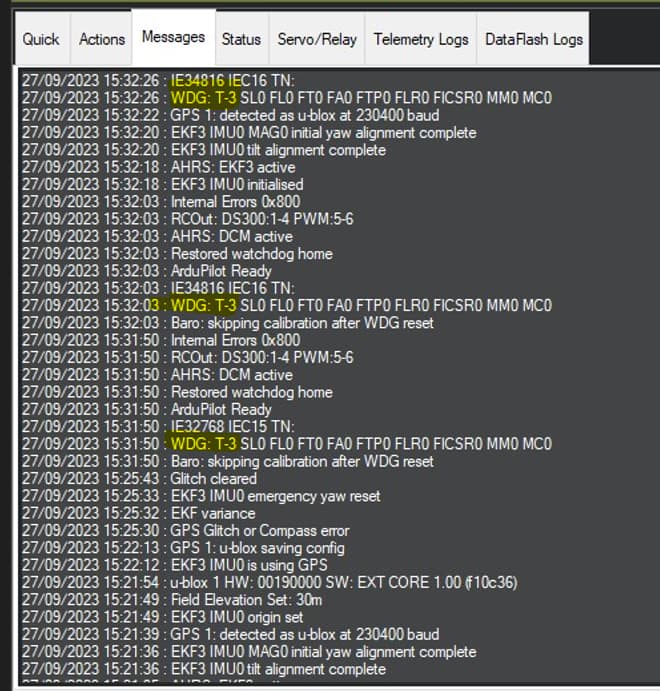
I now get internal error 0x800 once in a while.
I couldn’t get a bin file of the log, but I do have a screenshot of the messages: