I’m searching for a pinout diagram of the mRo Control Zero H7 stick carrier board.
I need to know if there are enough serial ports exposed so I can use at least 4 Mavlink connections.
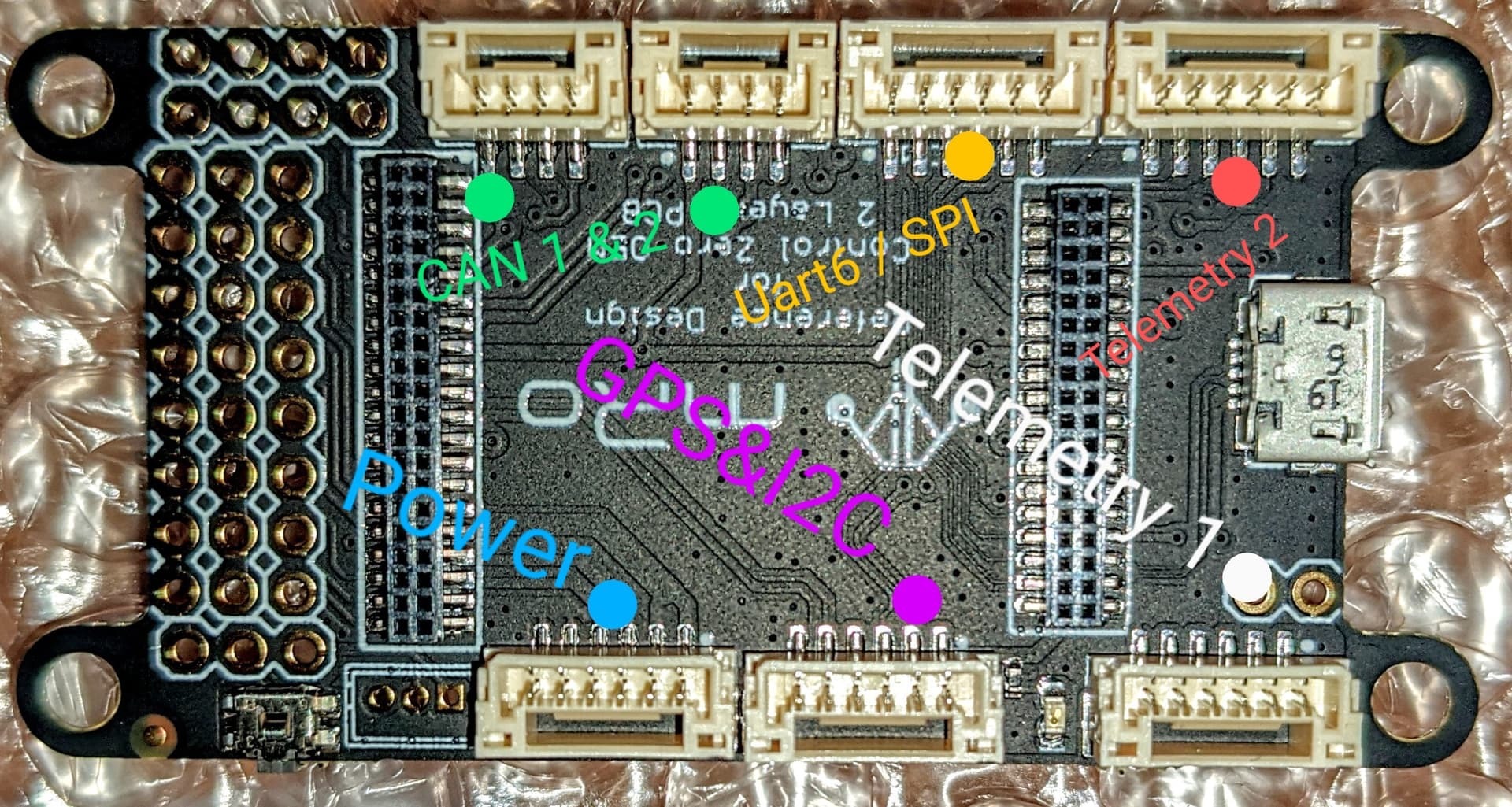
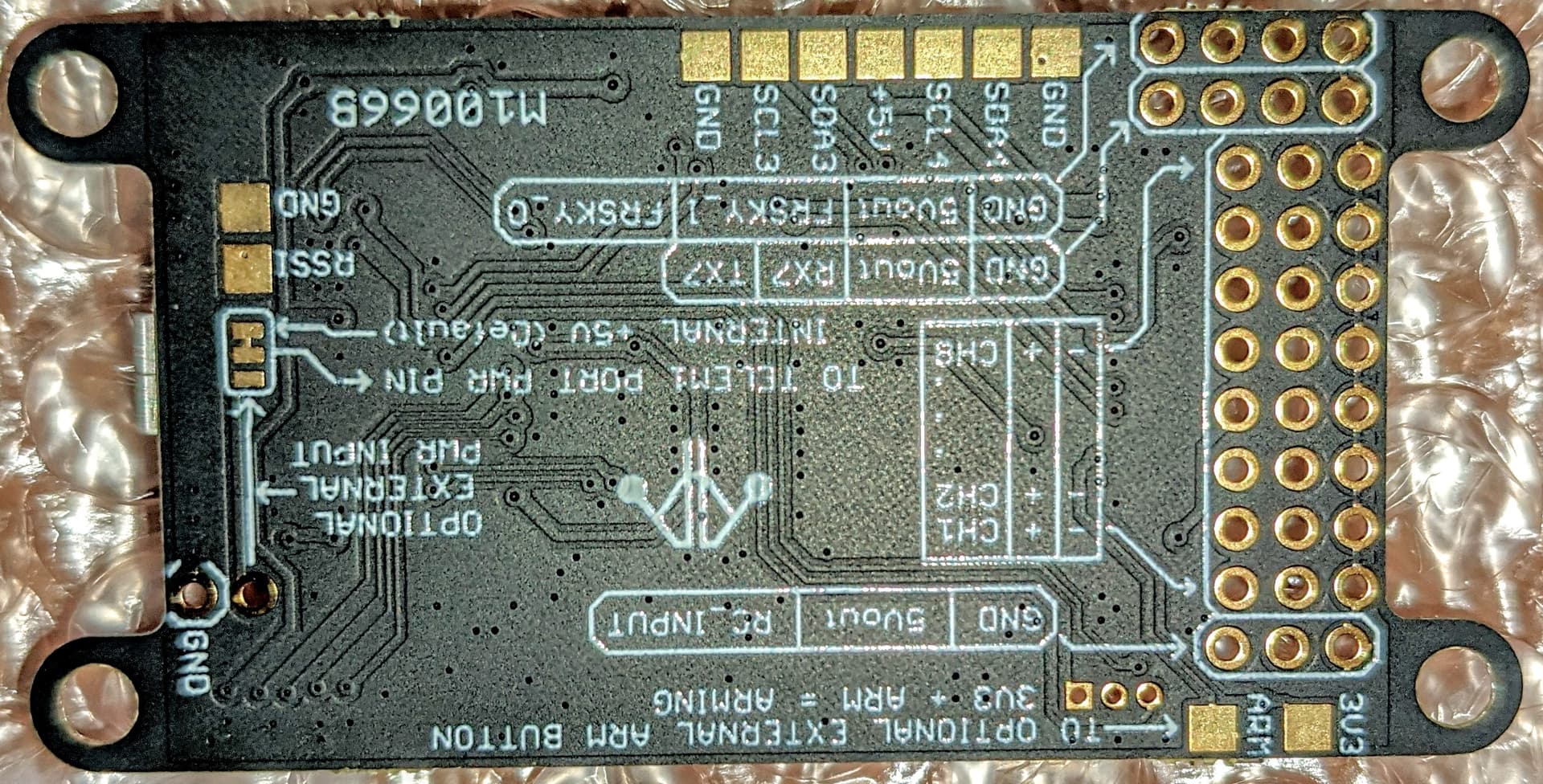
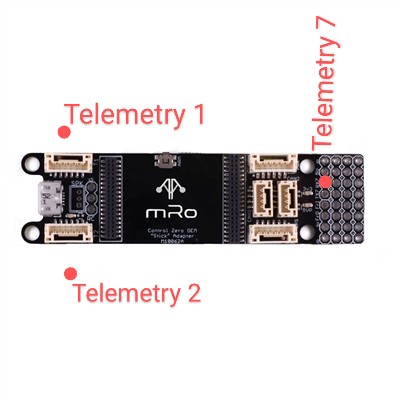
What I can see from the pictures, is that there are probably 3 ports available via JST-GH connectors and TX/RX-7 via the holes.
Is Mavlink available on TX/RX-7?
Is there another port for ESC telemetry?
THX!
According to the hardware config file for the board (ardupilot/libraries/AP_HAL_ChibiOS/hwdef/mRoControlZeroH7/hwdef.dat at master · ArduPilot/ardupilot · GitHub) there are 5 serial ports available. Any can be configured to use MAVLink, noting that you’ll lose a GPS UART port and FrSky telemetry port.
Should be, yes
You’ll need to use a UART for that.
It may be worth looking at using a companion computer to distribute the telemetry instead.
1 Like
Great information, thank you very much!
#offtopic: the companion hardware you are developing looks very interesting! Did you consider a analog video CSI bridge/converter too?
I’m still struggling if there are more than 4 ports available on the stick adapter (I did not mark the GPS telemetry connector bottom right).
There are pins at the connectors left, has any one got this board and can tell?
Here is at least some information on the reference design carrier board.