Hi,
I am building a glider, but have trouble setting up DShot and telemetry between a Control Zero and a Lumenier Razor Pro F3 BLHeli_32 45A 2-6s ESC.
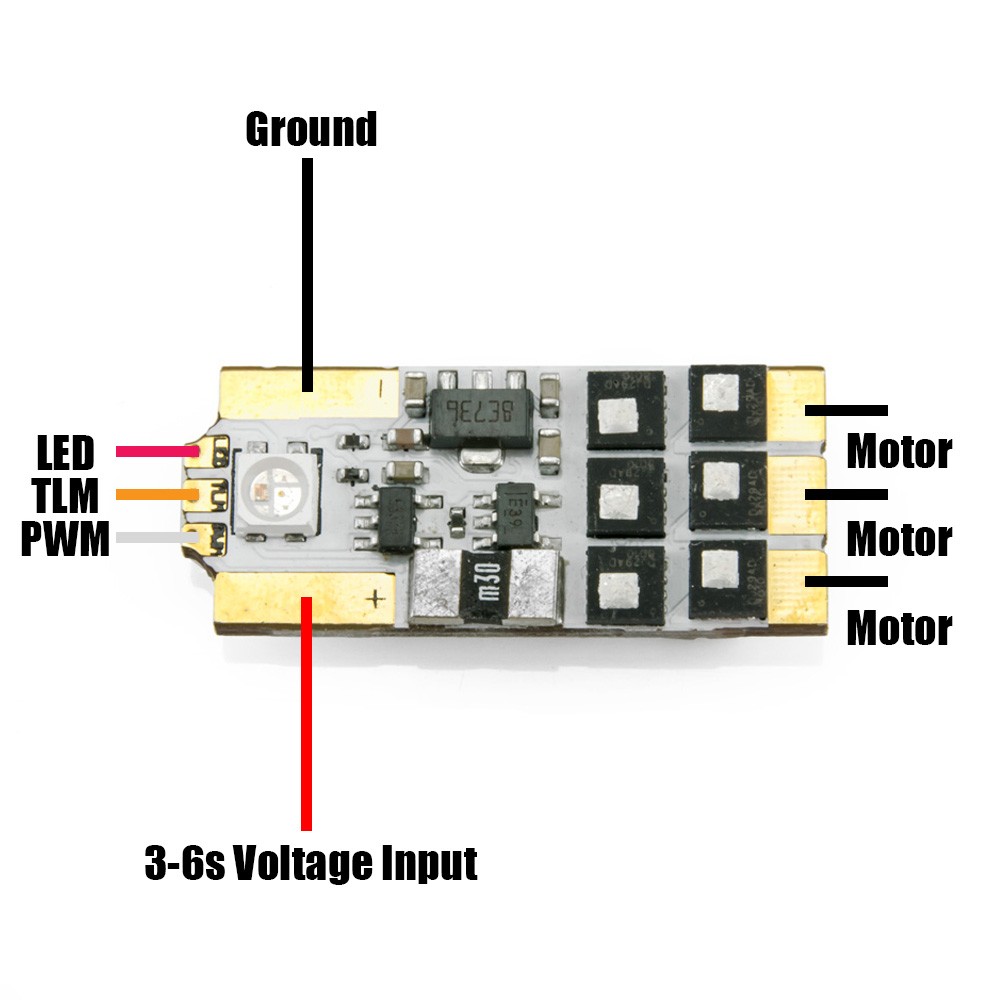
The ESC is connected to PWM7 with the following parameter:
SERVO_BLH_AUTO 1 (no difference if 0 or 1, works only with SERVO_BLH_MASK set)
SERVO_BLH_OTYPE 4 (DS150)
SERVO_BLH_DEBUG 1
SERVO_BLH_MASK 64 (Channel 7)
BRD_PWM_COUNT 7 (set for testing, only 6 servos and one ESC needed)
SERVO7_FUNCTION 70 (Throttle)
With these settings I get “RCOut: PWM:1-6 DS150:7” and the motor can be started.
But SERVO_BLH_TEST 1 gives me “ESC: Test FAILED”:
24.04.2020 07:03:44 : ESC: Test FAILED
24.04.2020 07:03:44 : ESC: short read
24.04.2020 07:03:44 : ESC: BL_ReadBuf 8 -> 0
24.04.2020 07:03:44 : ESC: BL_ConnectEx 0/1 at 6
24.04.2020 07:03:44 : ESC: short read
24.04.2020 07:03:44 : ESC: BL_ReadBuf 8 -> 0
24.04.2020 07:03:44 : ESC: BL_ConnectEx 0/1 at 6
24.04.2020 07:03:44 : ESC: short read
24.04.2020 07:03:44 : ESC: BL_ReadBuf 8 -> 0
24.04.2020 07:03:44 : ESC: BL_ConnectEx 0/1 at 6
24.04.2020 07:03:44 : ESC: short read
24.04.2020 07:03:44 : ESC: BL_ReadBuf 8 -> 0
24.04.2020 07:03:44 : ESC: BL_ConnectEx 0/1 at 6
24.04.2020 07:03:44 : ESC: short read
24.04.2020 07:03:44 : ESC: BL_ReadBuf 8 -> 0
24.04.2020 07:03:43 : Initialising ArduPilot
24.04.2020 07:03:43 : ESC: BL_ConnectEx 0/1 at 6
24.04.2020 07:03:43 : ESC: Running test on channel 0
24.04.2020 07:02:48 : RCOut: PWM:1-6 DS150:7
24.04.2020 07:02:48 : mRoControlZer 00300043 3237510F 3236343
24.04.2020 07:02:48 : ChibiOS: cbb955d4
24.04.2020 07:02:48 : ArduPlane V4.1.0dev (6d05ed1e)
Please find the Logfile here: https://drive.google.com/open?id=1OrpIYt_qLJ5Ehi5wv_Y-gVDyjIqTzzLI
DS150 signal (yellow):

Would it be safe to fly if “ESC: Test FAILED”?
BLHeli_32 passthrough does not work either (BLHeliSuite32 32.7.1.1).
It seems to connect to ESC (motor beeps when connecting), but I get “Found no valid ESC configuration.” error.
Same message as here https://github.com/ArduPilot/ardupilot/issues/12494
I think first “ESC: Test FAILED” has to be fixed to make the passthrough work.
Passthrough would be nice, but it is not so important for me.
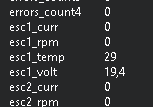
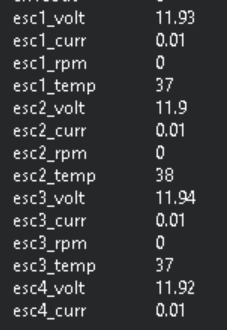
I’m not sure if my telemetry issue is related to Ardupilot, because ESC sends temperature, voltage and rpm and Mission Planner and Yaapu telemetry shows it, but no current information:

Both current and current consumption values are always zero, even if the motor is running.
Where would be the best place to ask?
At the “Dev Call March 23, 2020” at UTC0021 “CubeOrange and mRo boards and passthrough” were discussed (Dev Call March 23, 2020).
Is Control Zero affected? Who is “PK” and how did he remove the hardware buffers from GPIO? Hardware mod or software setting?
The servos MKS HV6110 and MKS HV75K directly connected to the Control Zero do not work. I also tried a Futaba S3156. But a Torcster NR-62 Digi 8g works.
It looks like the level shifted outputs are not able to pull the signal down to ground to discharge the parasitic capacitance of the servo’s signal input.
If I add a MOSFET driver (https://www.microchip.com/wwwproducts/en/MCP1402) with a push-pull output, the MKS servo works as it should.
If you would like me to perform further tests or measurements or provide information that I have missed, just let me know. Any help would be appreciated.
Best regards,
Christian