Hi, I purchased a mRoControlZeroClassic as a drop in replacement for the pixhawk1 on the BlueRobotics BlueROV2 after some water damage… needless to say it has not been very “drop-in”…
I can’t get any 5V output on the main servo outputs. On the previous pixhawk the camera tilt servo was on an aux channel whose power rail was provided by the SBUS input. I tried doing the same thing with the Control Zero Classic, but no luck. Even with SBUS connected there is no 5V on channels 1-12. The left 4 outputs have 5V available though (even the SBUS outputs 5V), which is odd, and obviously an easy hack is to separately wire this 5V to where it’s available and use the standard servo channel. But this should work.
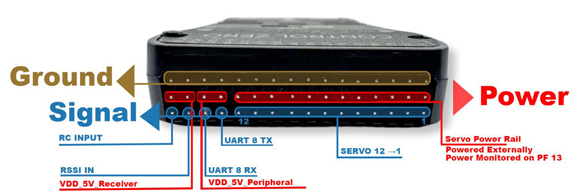
No surprise there it’s completely different architecture in the same old case. It doesn’t have an IOMCU for one thing which is a major difference. Anyway, from the manual:
If I get your meaning yes. One difference, among many, between Pixhawk 1 and This Mro version is the former can be powered from the servo rail while Mro is completely isolated. But it does not supply power on the rail unless you connect a BEC.