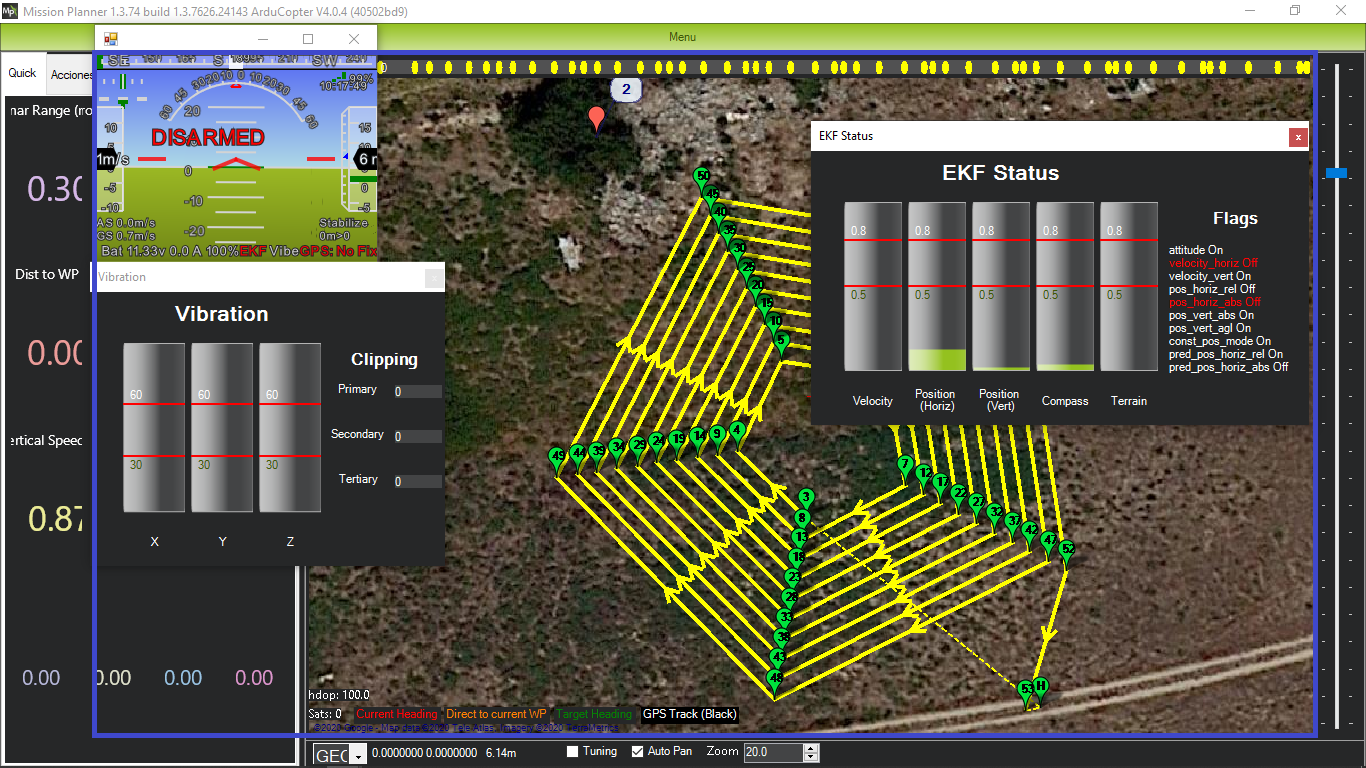
MP shows a nice representation of mission waypoints as yellow dots on a bar with a progressive marking, both when connected and when a .tlog is represented. Here appear both (connected at left, .tlog at right, both reflected below on a virtual lake with calm waters).
Left (connected): it seems as if yellow dots marking initialization is not done, appearing dots as from previous mission (some marked). When the vehicle crosses the first waypoint correctly it and only it is marked. When mission is restarted progress is unchanged, till first waypoint is crossed. So when the vehicle is armed and when mission is started seems proper moments to show all yellow dots unmarked.
Right (.tlog): what has to be done to have the same progressive marking on the yellow dots?
There is a hardly seen number behind the yellow dots. Is it traveled distance?
At the left of the yellow dots bar there is a square with a red number and a red sign, both when connected and on the .tlog (waypoints reading forgotten on that video). What are they? Number changes at times on the .tlog representation, but I can’t see what it indicates. Sign can be a V or an arrow, but seems always oriented at 135º.
BTW1, it would be nice if VIBE and EKF windows were of equal width, and without white bar above, dragging on a tiny handle, and closing on a tiny X.
the number is distance traveled. the readability depends on how many waypoint you have and how close they are together
the distance bar updates on a 5 second timer, and only when its in “auto” mode
ie if the mode shows as RTL, the bar will not update. and if the distance to the next WP is larger than the expected distance, then again it will not update. ie distance between 5-6 is 50m, and somehow you start the mission at home heading for wp6, then it would “lock” to wp5, until you get within 50m of wp6
i dont think changing the size of VIBE and EKF would work, they show a different amount of data
Up: auto and <50. Down: refreshed.
So refresh there is supposed to happen at the 5" mark.
Also, there appear 52 yellow dots. The mission has 5x10=50 type 16 waypoints, so I assume first is takeoff and last is land. Refresh above is after first type 16 waypoint. Is this so?
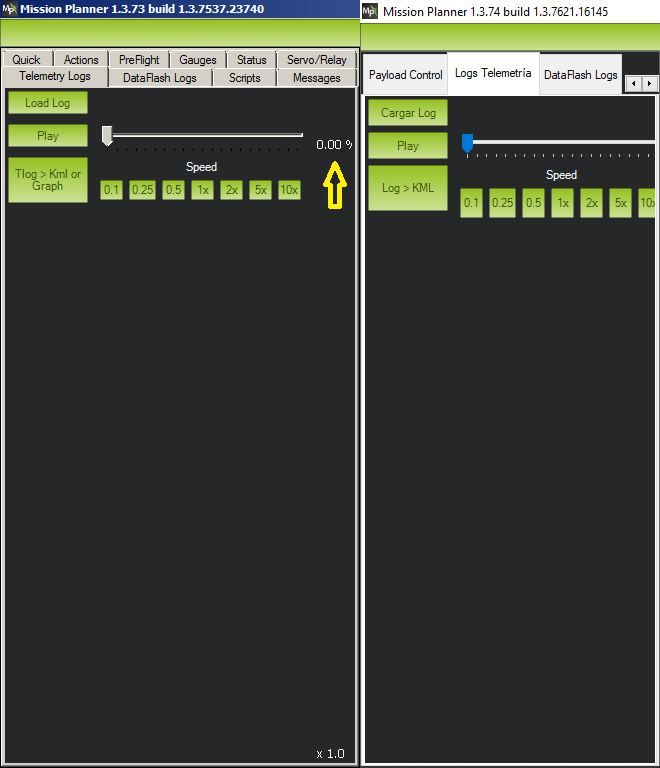
It would be desirable to have as much as possible capture pixels (on a 16/9 aspect ratio region capture) dedicated to waypoints, trayectory and satellite picture, but hud, EKF and vibration windows are nice. On a 1366x768 screen laptop this is how (except EKF window, to be placed under VIBE window) field capture would be prepared:
(I better said not immediately seen than disappeared).
Refering to preparing the .tlog capture (assuming its delay), this is how the left part without hud appeared before and appears now on a 1366x768 screen laptop:
So the good thing is that it is narrower, but for going to a specific part of the .tlog file using the gauge percentage the window has to be widened to make that percentage visible. So I wonder if the percentage can be placed elsewhere, the gauge made smaller, approaching or narrowing elements, etc.