For your Arduino, adapt serials, pins,… → carry to MP.
Note:
- Comments for having nice numbers.
- Pins to synchronize an oscilloscope.
- Simulates two aligned lidars rotating at the same pace at a vehicle rotating (bigger N_FLOAT/N_INTEGER slower vehicle rotation), but only one on the drop down.
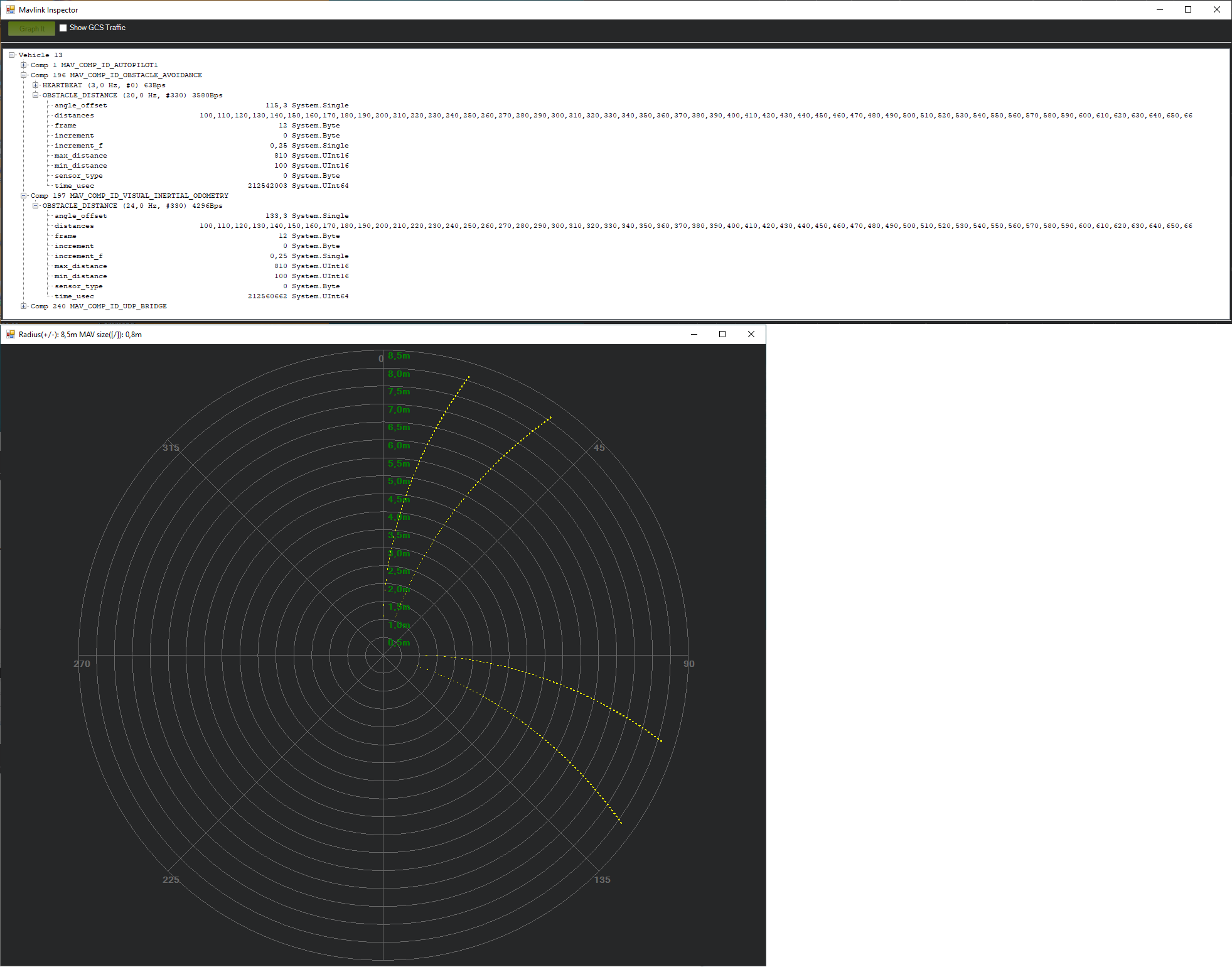
- No heartbeat for component_id MAV_COMP_ID_OBSTACLE_AVOIDANCE+1. Needed? (Easy to add).
- 30 distances commented. 72 distances not appearing all on MAVLink inspector.
- Not possible to display the second distances radar window (no drop down, and which component_id to use?).
- Many yellow arcs missing (very few appear on the core i5).
I have seen a crash on the core i5, but seems to last long on the core i7.
Possibly, you should start commenting the code for the second serial (second packet MAV_COMP_ID_OBSTACLE_AVOIDANCE+1).
Note that if two radar windows were possible, it would be needed to identify which is which. I asked in the past some id on the caption bar for a similar situation, but didn’t get any answer.
I also have had always to stop Arduino activity (with reset or however) while MP connects; if not, it keeps reading parameters forever.
Capture on the core i7: