It is the “garbage” that you sent…
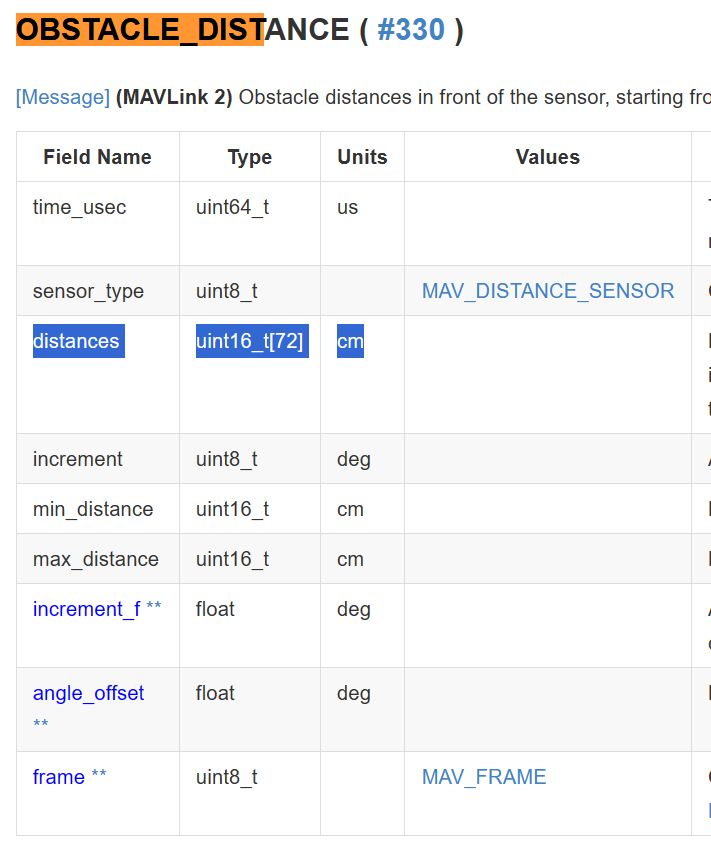
The mavlink message contains 72 int16 values;
You created a 20 element array, so it took the bytes from memory after that. The size of the distances array is fixed, you cannot change it. So your code should start like this : const uint16_t distances[72] = …
My understanding is that this line here sets the array up to avoid the garbage, if im honest im not 100% sure on how it works, it was @count74 that done it originally.
memset(distances, UINT16_MAX, sizeof(distances)); // Filling the distances array with UINT16_MAX
This line fills the array with placeholder (which tell ardupilot to ignore these segments) values, before the actual distance values are written to the array.
And you give me way to much credit for this code. I frankensteined it together until it worked.
I havent found anything better to use as an interface for proximity projects so im still using your frankensteined code. I really havent changed much other than the type of rangefinder and how it moves.
Using your 72 segment proximity, and the i2c rangefinder adapter that @ppoirier done I can pretty much interface any rangefinder I can find a library for usually by just copy and pasting a couple of lines.
Anyhow, that didn’t solve the problem I am observing: the distances radar (yellow traces) hangs frequently.
I made a 1920x768 video of it:
It is long so you can go directly to the end, as indicated on the Youtube video index.
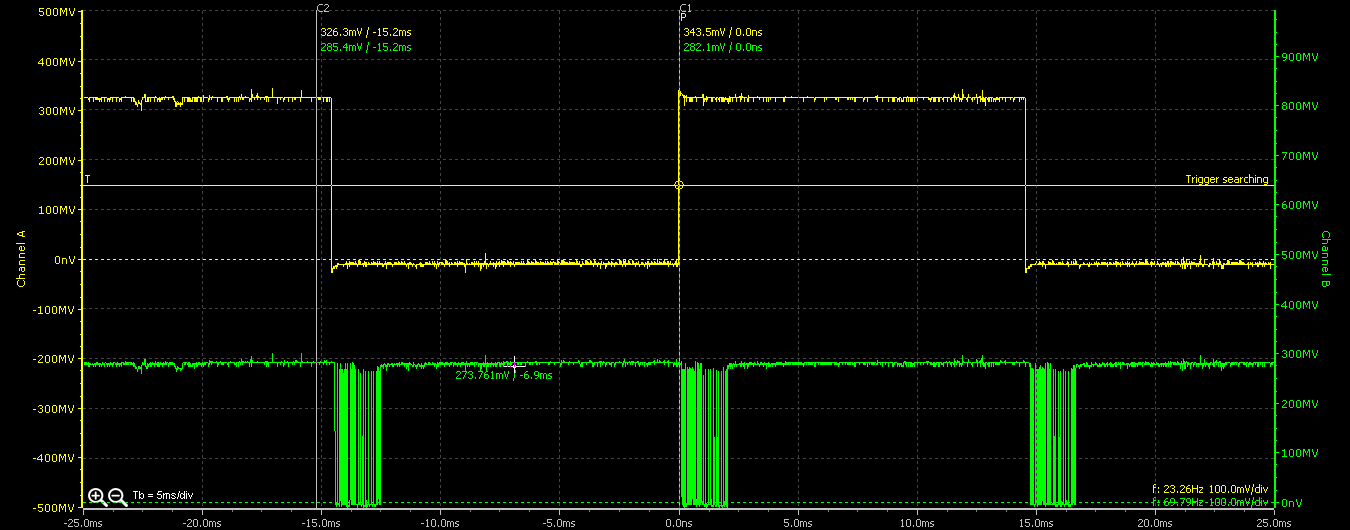
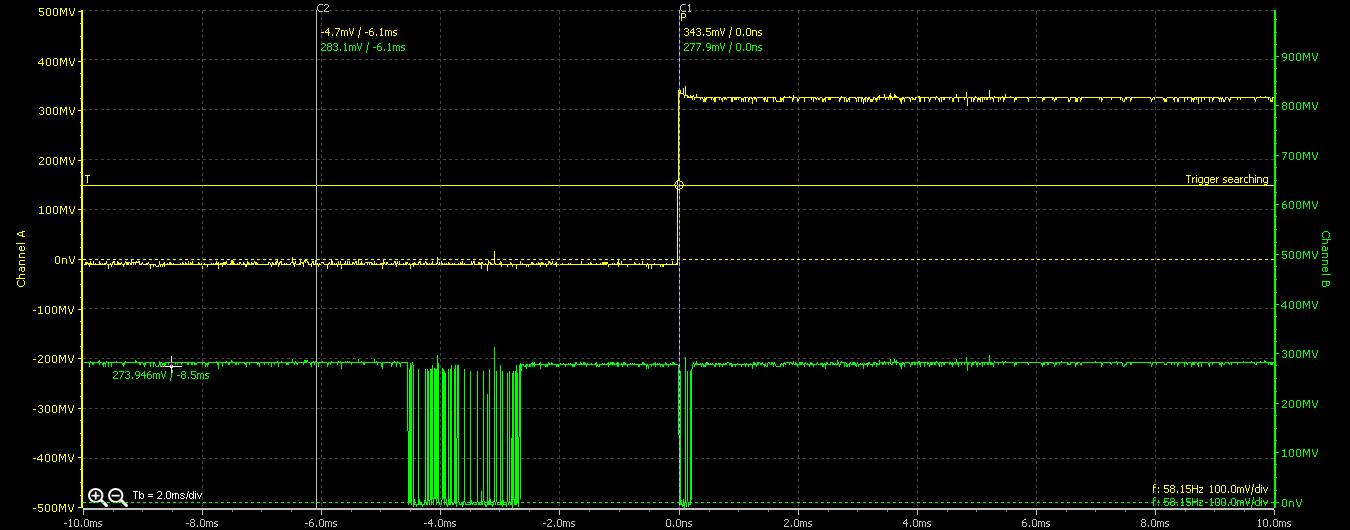
As far as I have seen, the Delta2G lidar sends a frame of 30 distances for each 24º (0.8º/sample as seen on the MAVLink inspector), with 16ms from frame to frame. Each frame corresponds to a yellow arc. For producing some video animation, the offset of the first sample in each frame is changed on the simulation.
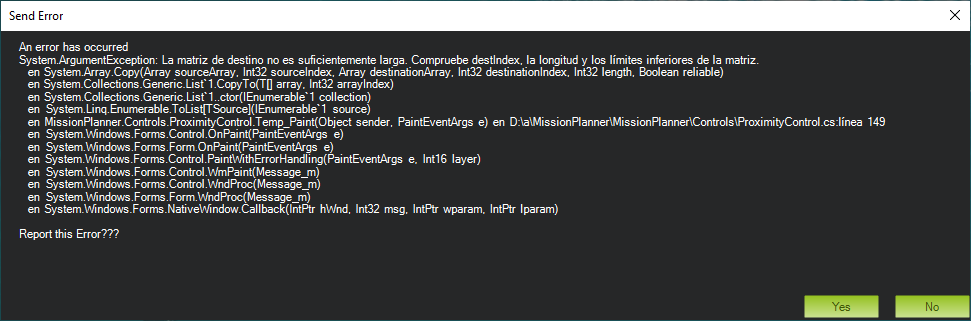
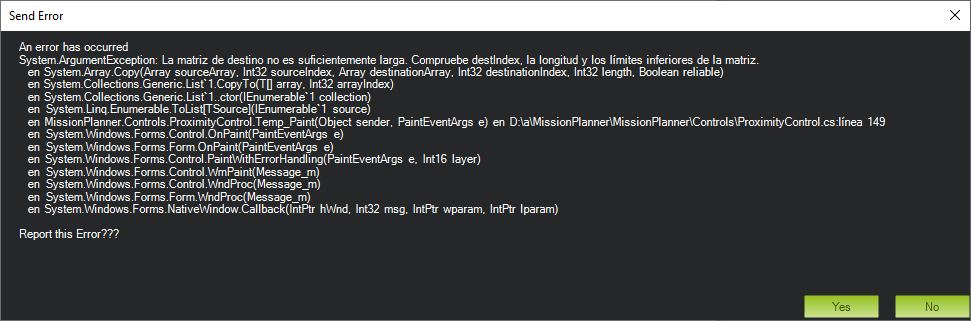
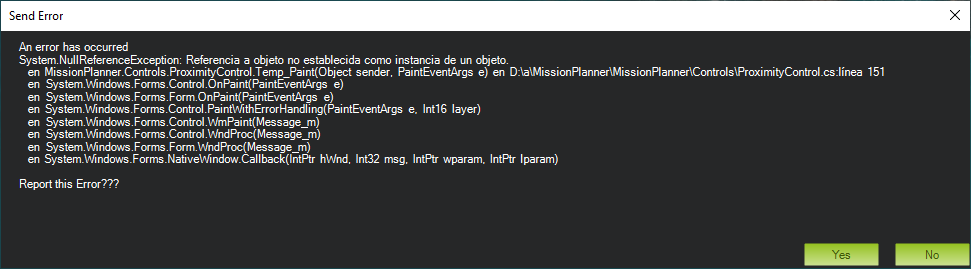
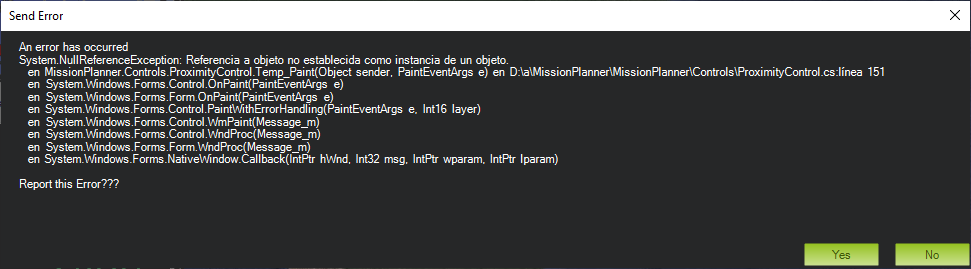
The MP (1.3.80 build 1.3.8693.15776) error trace window is:
that yellow proximity display does not look correct, I have never seen anything like that. you must not be maping the lidar to the mavlink correctly as the only way you would get that swirl on the display is if your trying to feed more than 72 slices into it so it gets offset more each rotation.
so 30 measurements for each 24 degrees, 360/24=15 15x 30 = 450 slices
so mavlinkAngle = map(lidarAngle, 0, 449, 0, 72);
that will map the 450 slices to the 72 slices of the mavlink interface.
your only sending 72 slices not 450 so it cannot be less than 5 degrees on a 360 degree sensor I dont know why you have it set to 0.8.
Easy: 24º/30samples. You can see it on the MAVLink inspector on the video.
But the important thing is that the simulation simply sends mavlink packets using standard mavlink calls (also for above image) to MP: it should not hang.
your not sending anything correctly, you cannot get 0.8 degrees, it best you can get is 5 degrees as you can only send 72 slices when using a 360 degree sensor.
The one I got was faulty so I never got to test it. if your struggling to process it with the 2040 then you might need to look at the stm32 f4 blackpill board as its a much more powerful chip. the 2040 is pair of very low power m0+ cores and is just barely fast enough to run the XV lidar.
another option would be to split the code so the reading the lidar is done with core 1 and sending the serial data is done with core 2.
Forget about the lidar simulator. It keeps bussing after the failure, as seen on MP red traces radar window and MAVLink inspector window. It doesn’t even read the lidar: it simply generates the MAVLink messages towards the FC for the 30 first distances in the distances[72] array, on the video above as if the vehicle carrying the simulated lidar were rotating. But connecting its wires requires time, and I am not going to lose it trying a different processor.
There is a physical FC for sending the stream with all the MAVLink messages to the laptop on a 921800bps stream over wifi, which also keeps bussing as well as MP itself other windows (main, MAVLink inspector, red traces radar, ^F window with thousands of buttons…). It is a core i5, but I have observed this hanging also now on an i7 and a Celeron. About its performance for MP, I have run in the past on it four MP instances at the time for four vehicles, each with a 921800bps stream over wifi, having a mechanical disc (now it has a SSD, with much better start time and general performance), and it kept bussing.
The MP tracing error window says something about a matrix destination not long enough.





")
 4K")