Hi, I have a Lenovo Yoga C930 with a highDPI display running Linux Ubuntu 21.
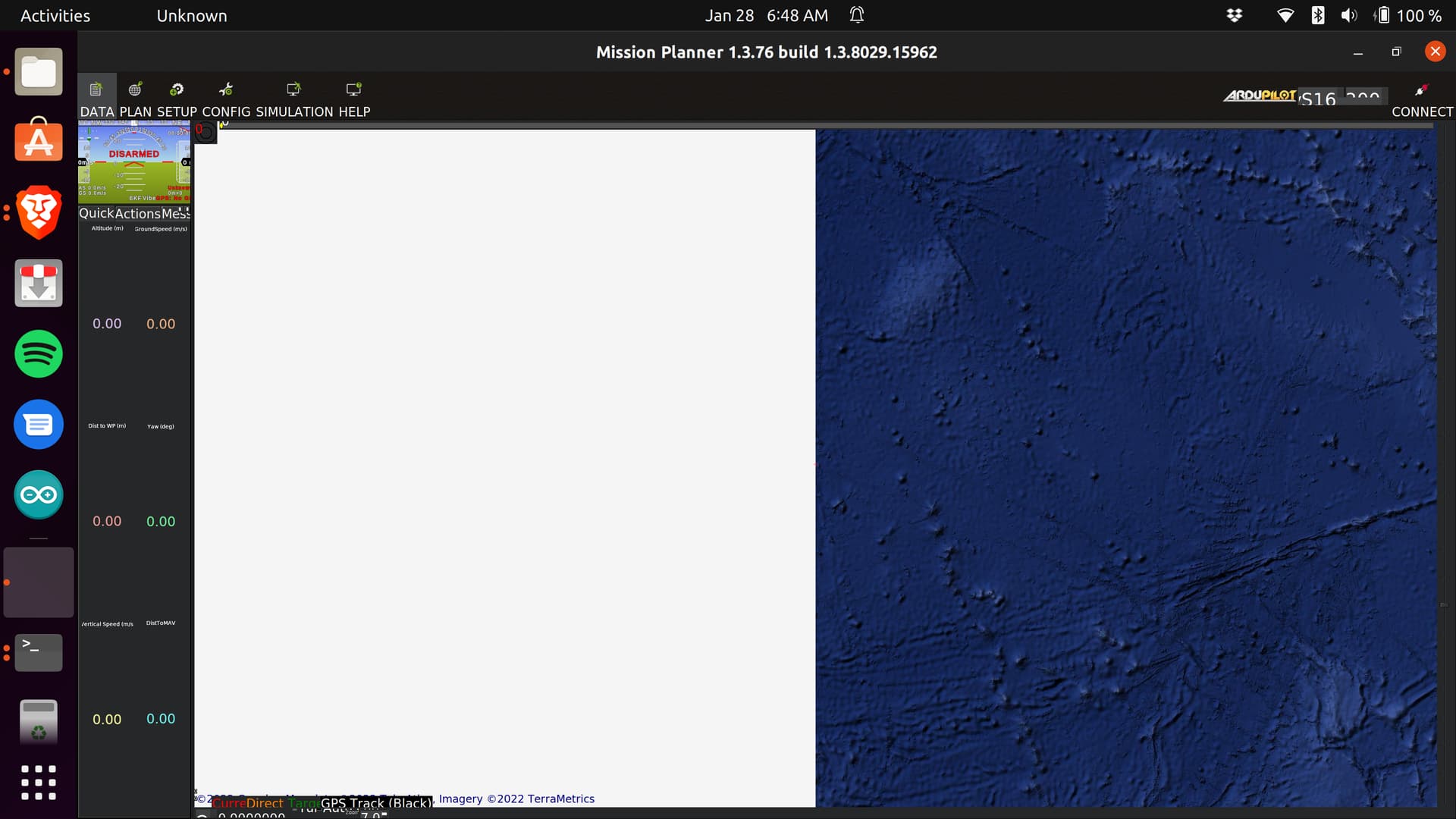
When I use mono MissionPlanner.exe the display is like this:
I’ve looked up scaling issues on mono and MP, but can’t find anything relevant.
Any ideas?
Hi, I have a Lenovo Yoga C930 with a highDPI display running Linux Ubuntu 21.
When I use mono MissionPlanner.exe the display is like this:
I’ve looked up scaling issues on mono and MP, but can’t find anything relevant.
Any ideas?
.NET is an awful, partially undocumented mess on an API - far from multiplatform. Much of which the mono developers need to reverse-engineer to run.
The developers on MP are deeply stuck with microsoft, due to the use of the .net bloatware and this situation has not improved in the past years.
For GCS software that is really multiplatform, check out QGroundControl, APMPlanner2 for log analysis, and MAVproxy as a power-user and very customizable option.
QGC and AP2 are the easiest to do.
You will also find that avoiding MP gives you more stable releases, with less bells&whistles, but much fewer odd bugs and regressions.
Despite Michael’s effort into making MP multiplatform, it is still a windows application by design and runs best on Windows. (There are a lot of effort ongoing to make it good on android however) If you run it on its intended platform, it is rock solid and supports the latest ardupilot features. (Which is not a case for either QGC or APMPlanner2).
Note: I don’t get why on earth somebody wants to run Ubuntu on a notebook which is perfectly fine for running windows (even designed to run windows). But It is your choice.
Anyway, if you want to run Linux and need support for the newest features of ardupilot, then use MAVProxy. If you are OK with some functions missing, then go with QGC. APMPlanner2 development is pretty much stalled, there was not a single commit since last Aug, and its log analysis does not work with 4.1 AP releases.
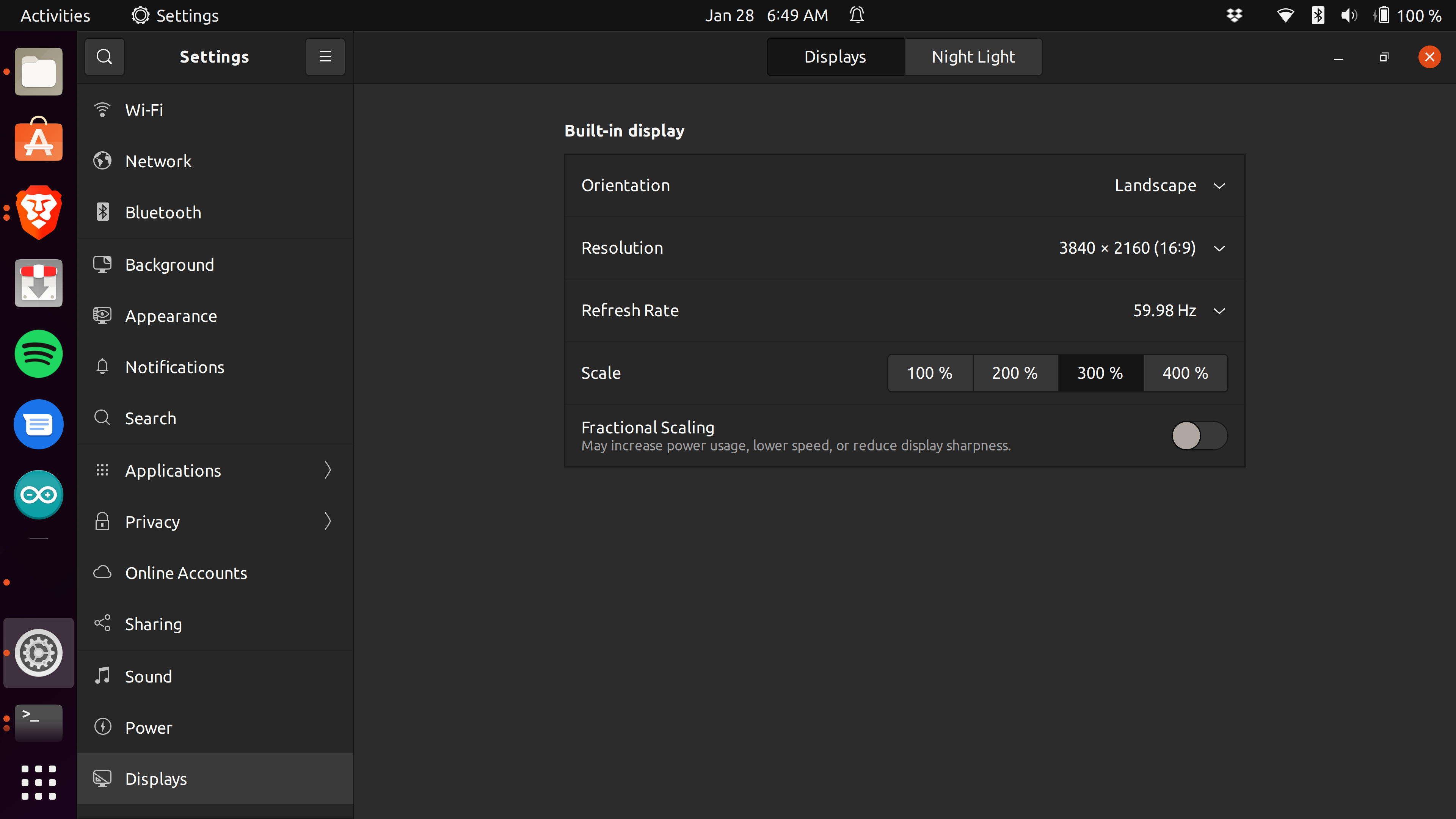
A simple workaround is to use xpra and run_scale. I am doing
run_scaled mono /opt/ardupilot-mission-planner/MissionPlanner.exe
And the mission planner will run with 2x size. Of course, the font is blurry but it is much better than staring at a tiny window.