This will be my build log of Mowbius.
As this is my first build, I wish to pay it forward, capturing my lessons learned and helping others who embark on a similar journey. Thank you all who have documented your builds and helped others, as I would not have gotten this far if it weren’t for you.
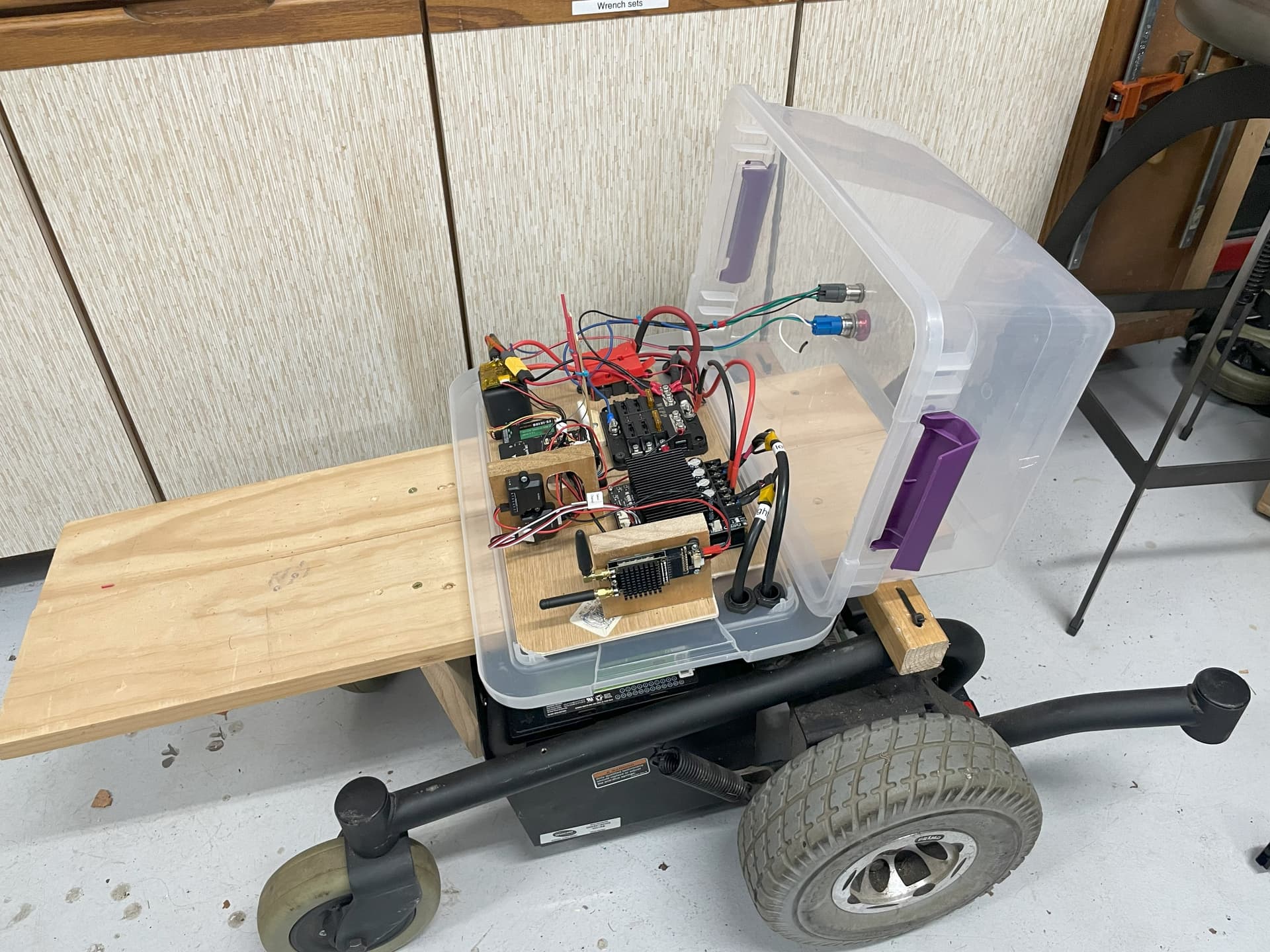
Mowbius, is my attempt at building an autonomous mowing platform for my 1/4 acre, suburban yard. One might wonder why i don’t just get a Mammotion Yukka, which appears to meet my primary requirements: Autonomous, bagging at night. Simple answer: where’s the fun in that!? (plus, i’d likely wish it could do more than just mow and sweep grass)… we’ll see.
I’m building a testbed first to get the controls understood and figure out what it takes to be succesful, before i go tearing up a mower.
I’m starting off with a Pronto M41 mobility chair
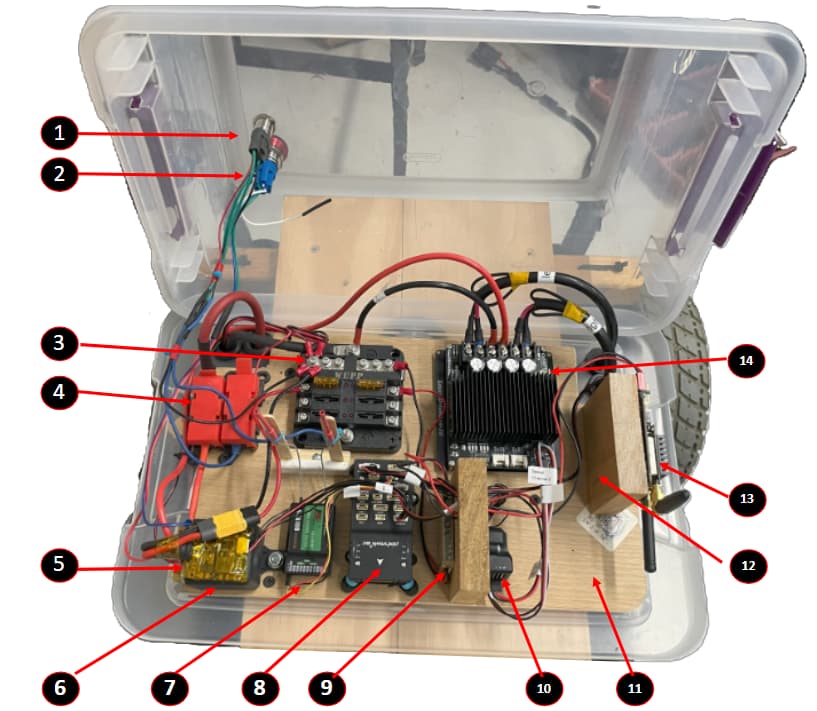
not shown: Batteries, two 35Ahr Sealed Lead Acid wired in Parallel
- Controls power switch
- Propulsion E-stop switch
- Low Power fuse block
- 2-way Midi Fuse Holder 60A to motors, 15A to low power.
- Holybro PM06 Power Module -
- High Power Emergency disconnect relay
- FlySky 10 channel reciever FS-iA10B (with FS-i6X transmitter)
- Holybro 6c Fight Controller
- Matek UBEC DUO - (two 5v / 4amp outputs for Telematics radio & Servos)
- Motor servo and GPIO outputs from 6c flight controller
- Future home for Cuav RTK2 HP GPS module. - and USB power step down
- Future home for relays: mower motor, flood light
- RF Design 900x US modem
- Cytron MDDS-30 dual 30A motor driver.
Learnings:
- I surely could have used a less expensive Battery monitor and down converters. And there certainly are some more expensive ones. However, i liked the simplicity of the Matek Duo
- Holybro Documentation was confusing. I failed to interprety their I/O PWM OUT (MAIN OUT) documentation correctly. I took that Left Motor should be connected to pins 2 (i/o channel 1) and Right Motor should be connected to pins 4 (i/o channel 3). Hours of diagnoisis later. Left goes to Pin 1, and right to Pin 3. (ignore the channel names in Holobro’s documetation).
- Abaove all, follow the set-up & configuration process outlined in the WIKI. It is very easy to get distracted and off course. There are seemingly many different ways to accompilsh the same things; three lefts do make a right afterall, but these maskings can build on one another. I can’t emphasis this eough when it comes to motor control. The transmitter mapping, motor controller wiring, steering & travel connections, Ardupilot motor reversing, and Pilot_Steer_Type all interplay with the response. I finally had my single stick operation working beautifully, with the motor controller in mixed mode, running through channels 1 and 2output, and my tranmitter outputs reversed. But then i ran into "rudder (steering) arming issues. Follow the WIKI directions, else this step by step, reiterated guidance.
- FLight Mode Switches: Mixing channels 7 & 8 to establish 5 flight modes (Hold, Manual, Auto // Steer, Manual, Acro). I found lots of videos and discussions about how to set up the master and slave, pos and neg mix ratios. Although the logic behind it does not make sense to me, the settings used in this video did work for my Flysky controller.
- Telemetry radio - the RFD900x is likely overkill / power-hog for my needs… but with all the trees in the area… and if i’m able to do the neighbor’s lawn too, i might make back some of this expense.
- ESC calibration error. I felt i ever I completed the ESC calibration step I always got this error: “Set param error. Please ensure your verson is AC3.3+”. i found many references to this error, stating Mission planner needed to be reinstalled or rebooted; and others stating that the message is merely that, a message, and that Rover 4.5.6 has AC3.3 and to carry on. Nothing was ever accomplished during this step. The motors turn in the default setting, but i don’t know what i’m missing, if anything.
- Motor Driver - i was tempted to try two BTS7960 drivers and save $60. Maybe i’ll try one for a power rake, or the edger a few years from now.
I still have Bad AHRS and No compass errors. I imagine i need to dig through the cusions and sell some of the mobility chair parts to get the GPS (with compass) before i do my first drive and tuning.