How do I raise the throttle and move other switch controls etc on SITL please?
(MP in running on Windows 7)
Assuming you run with Mavproxy in between the Mission Planner and the APM, you have 2 alternatives:
- Send the RC commands from Mavproxy command line, ie:
arm safetyoff
arm uncheck all
arm throttle
rc 2 1000
rc 3 2000
rc 1 1500
mode fbwa
2.Go for optional hardware in the setup dialogue of the mission planner and install a joystick. ARM the aircraft through Mission Planner and then use the Joystick to send the RC commands which you can verify from the status window (ref: https://ardupilot.org/copter/docs/common-joystick.html)
I don’t have any hardware, just using MP and experimenting with the simulator within it. I assume I need to download Mavproxy for windows and issue the commands from it.?
yes, it is my bad - I did not mean to imply that you need an APM - I should have said Ardupilot instead.
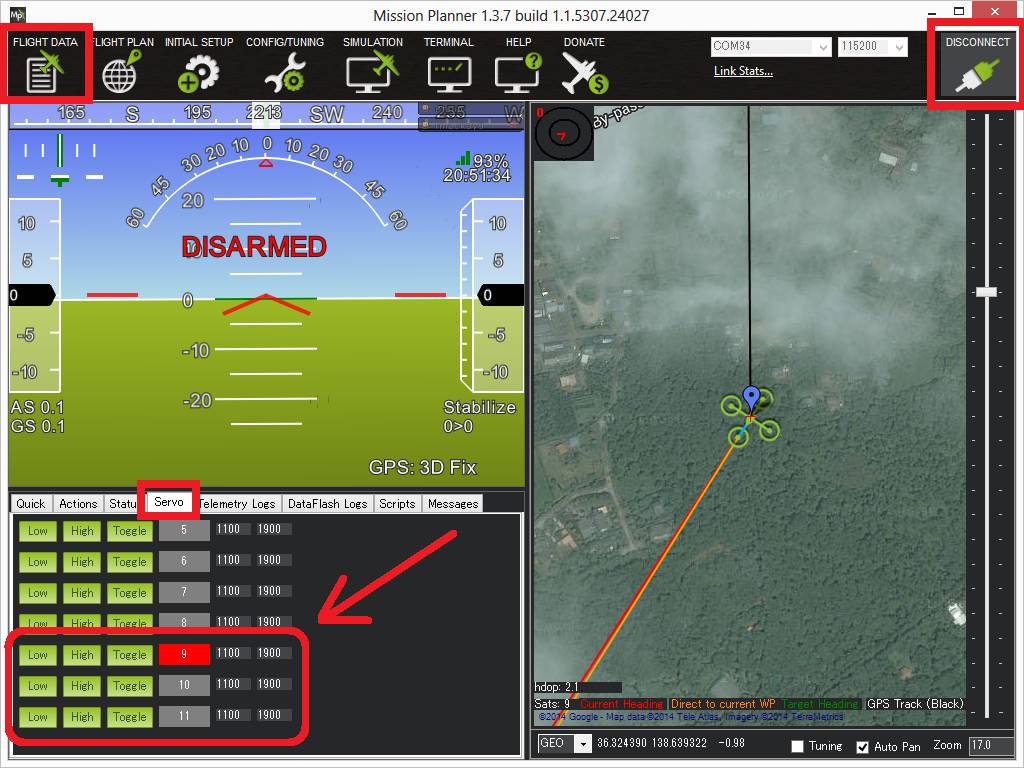
I think you could possibly do without Mavproxy, but its command line features may prove to be convenient. In Mission Planner there is a dialogue to adjust servo PWM values:
“The mission planner’s Flight Data screen includes a “Servo” tab on the bottom right that can be used to test that the servos are moving correctly.“
You may check QGC, which features a virtual joystick for SITL
https://docs.qgroundcontrol.com/master/en/SettingsView/VirtualJoystick.html