I have a Rover with dual F9P GPS in moving baseline with a local base station feeding RTCM through mavlink configured for GPS yaw. The Current Heading is not updating to match the GPS Track, and the GPS Track is correct. Often during a mission the Rover icon in Mission Planner will be pointing 20-45 degrees away from the direction of travel.
Any help is appreciated. Parameter File Telemetry Log Rover Image showing GPS antenna locations
I’m having a lot of difficulty getting turns dialed in. I think the speed controllers - some old Victor units - aren’t helping matters as they are rather touchy and would benefit from exponential, but I also feel like the yaw issue is a confounding factor that I’d like to correct.
Yaw is functioning with both GPS in RTK fixed on Ardurover 4.1.0-Dev. The GPS track is true and accurate to the rover’s pose. It’s the Current Heading that is not tracking the rover heading.
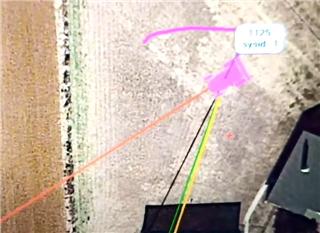
The black track in this image represents the GPS heading and actual direction of travel. The red line represents the vehicle’s Current Heading. So instead of turning to face the direction of travel, the machine icon ‘crabs’ along the black line while pointing at the red line. The HUD indicates the compass heading is the red line, not the actual direction of travel. It knows the GPS heading, but it offsets the value rotated to the right to get the Current Heading.
If the two rover GPS locations are not correct in Mission Planner, that could give you the indications you are seeing. Might re-check those under the GPS parameters in Mission Planner.
If one GPS is not getting the RTK info, I’d expect the red Current Heading indicator to to wander around while on straight track. Is it? Or is it really staying on a constant offset as it runs it’s course?
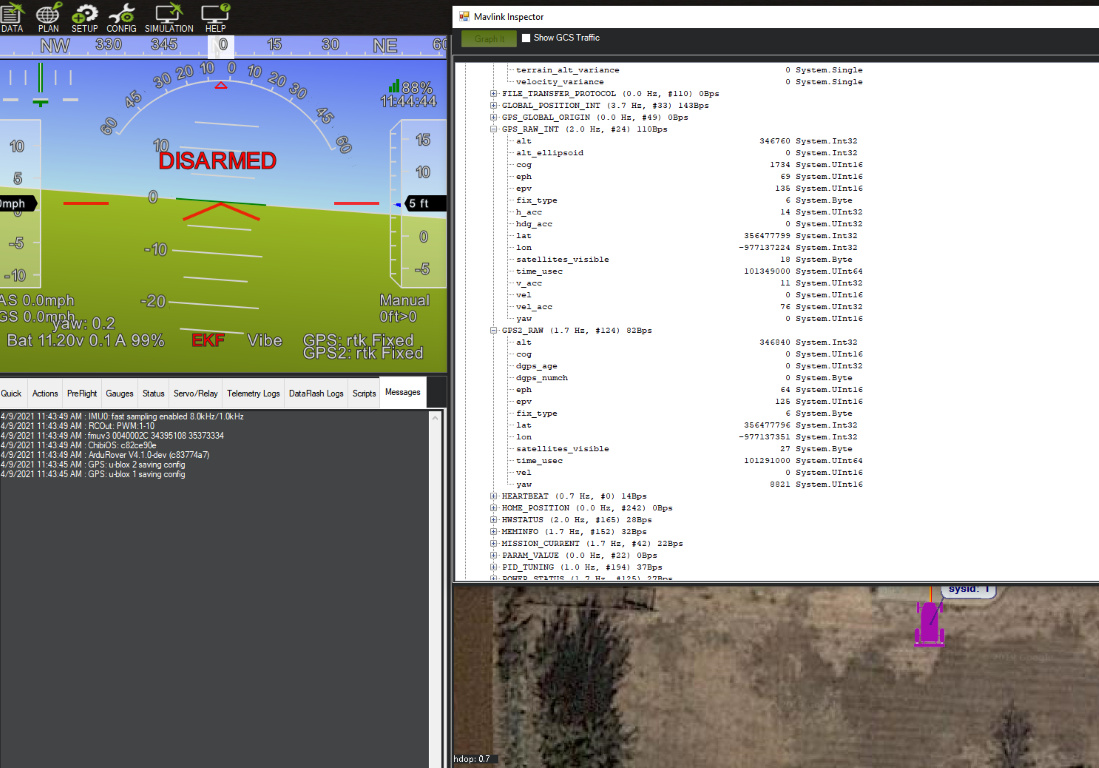
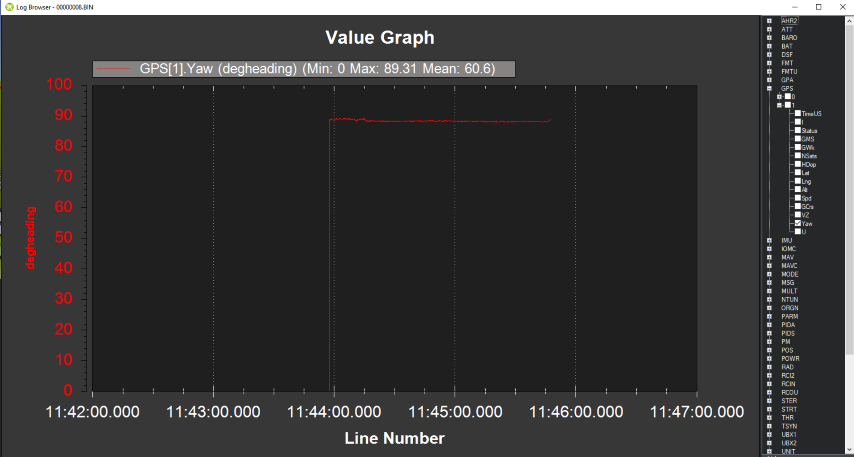
GPS Yaw information is being generated and recognized according to Mavlink Inspector. The correct heading is being determined by the GPSs per a review of the binary log, but EKF reporting RED in the HUD and GPS yaw is not being used. Rover always boots up heading due North, but once a yaw/heading fix is achieved the reported heading does not update. The GPS Heading is correct when driving, but the Current Heading is not. I have to assume that EKF is basing GPS Heading on the historical motion path, not the GPS generated yaw value. The Current Heading is not off by the same amount every time.
The images below were after I loaded Plane firmware, wiped the SD card, loaded the latest Rover 4.10-Dev, manually input my parameters, and rebooted the GS and FMU warm. The Rover is pointed Due East (90 degrees). The GS shows the Rover heading due North. The HUD shows due North. GPS both report RTK Fixed, and Mav Inspector shows GPS Yaw active on GPS2. GPS 1 is configured on Serial 5 and is located in front of the FMU with offset only in the +X axis, configured as Type 17. GPS2 is on Serial 4, located to the rear of the FMU with offset only in -X axis, and configured as Type 18. RTCM is injected from the base station and being sent to both GPS (verified). A review of the binary log shows GPS yaw at 89.3* (due East).
What am I doing wrong here? Why is my EKF reporting red? Why is GPS yaw not being used?