Hi all
I am stuck with a problem that I can’t solve…
Running a copter on 4.5.0-beta2 with Mnt1 configured as a 1-axis pitch servo gimbal.
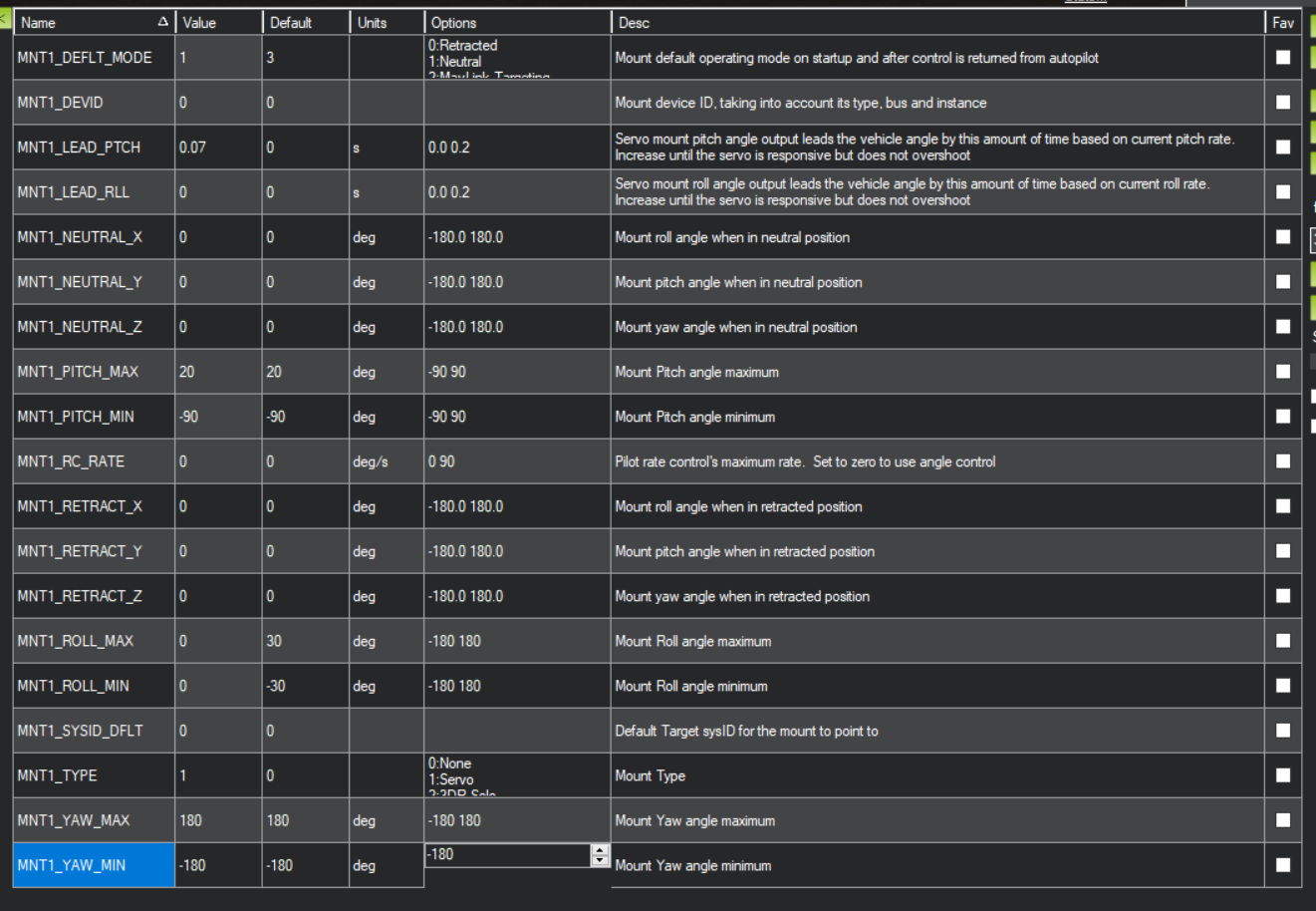
Mnt1 is working as it is stabilized when the copter is powered on and I have set pwm params & MNT1_PITCH_MIN/MAX to match the movements I want.
I am using Qgroundcontrol v4.3.0 on a android tablet with joystick as a GCS over a datalink.
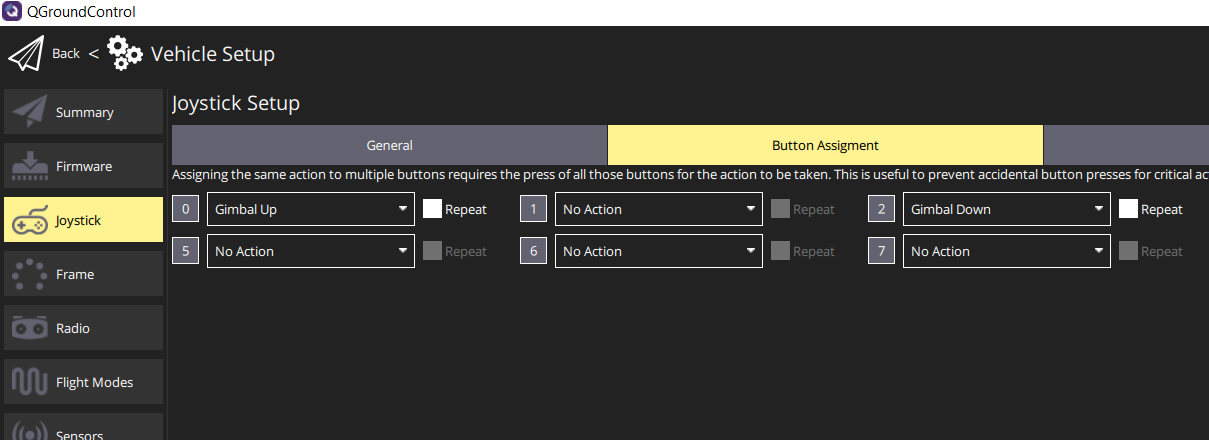
In QGC i have setup the “button assignment” in the joystick setup to control Mnt1 and I have 3 functions bound to buttons, “Gimbal Up”, “Gimbal Down” & “Gimbal Center” .
When I press either Gimbal Up or Down button I get message “Warning: Mount: invalid angle targets” and gimbal does not respond to the commands however “Gimbal Center” function works.
Would really appreciate some input on what the issue might be or point me in the right direction.
@rmackay9 you are correct it does not work in previous versions either.
I have tried stable down to 4.4.x as well as custom builds with deprecated MOUNT_CONTROL messages enabled as well as MAVLink CameraV2 support enabled but no joy.
When using mission planner I am able to control MNT1 but QGC does not.
I am using Navigator-tab3 as a controller and using QGC due to the android joystick support.
It makes sense what you said regarding centi-degrees vs degrees, if so I wonder if it just a small edit in the code and I could compile a custom QGC apk version with the change.
Anyway really appreciate any info/results you find
I’ve tried to re-create but I’m not very familiar with QGC and I don’t think that the desktop version allows settings up buttons. I will have access to a Herelink in a couple of days but before then, if you tell me what autopilot you’re using I’ll create a debug build that will tell us what angles are being sent in. This way we can confirm that it’s using centi-degrees (or not).
@rmackay9
I am using a mRo ctrl0 F7 board
Also see QGC screenshot in the Joystick config section (should pickup windows vJOY device as joystick option and you could use a virtual joystick program to simulate.
In the Joystick button assignment is where the “gimbal Down” button is selected from the list of all available functions available for joystick button mapping.
It’s a “bug” in QGC so I’ve raised an issue here. It’s a very simple fix but QGC doesn’t seem to be releasing stabler versions very often so who knows how long it will take to be released.