Hi all.
I crashed my quadcopter today and would appreciate help understanding the exact reason behind the crash.
First I took off and ran AutoTune which took around 15 minutes. Then switched to PosHold and did a couple of runs back and forth to test the new PIDs (it indeed performed better than before). Then, while in PosHold, I switched RTL On, the quadcopter successfully returned and started descending. At around 5 meters altitude I flicked the RTL switch Off like I did many times before and expected the quadcopter to stay in place in PosHold, but instead it stopped the motors and dropped down like a rock. Luckily I was able to recover the log from the FC. I believe the FC got shorted due to the impact so the log ends abruptly. You can still see the AccZ spike right near the end though.
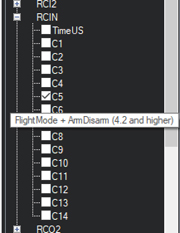
I have my flight mode switch on CH5, arm/disarm switch on CH6 and RTL switch on CH7. I am sure I did not flick the arm/disarm switch during the descent and the log confirms that.
Is there some setting such as “drop on RTL Off when below N meters” I missed? It feels like I’ve read about something like that. Or what else could be the issue?
Log file: Proton Drive