hi everybody
hi @ppoirier I try to put the functional drone with pixhawk before passing OcPOC
by following the tutorial on the wiki and video https://www.youtube.com/watch?v=CfQ-9MIHKkU&index=2&list=PLYsWjANuAm4r4idFZY24pP6s1K6ABMU0p
I calibrated the bosole and the magnetometer
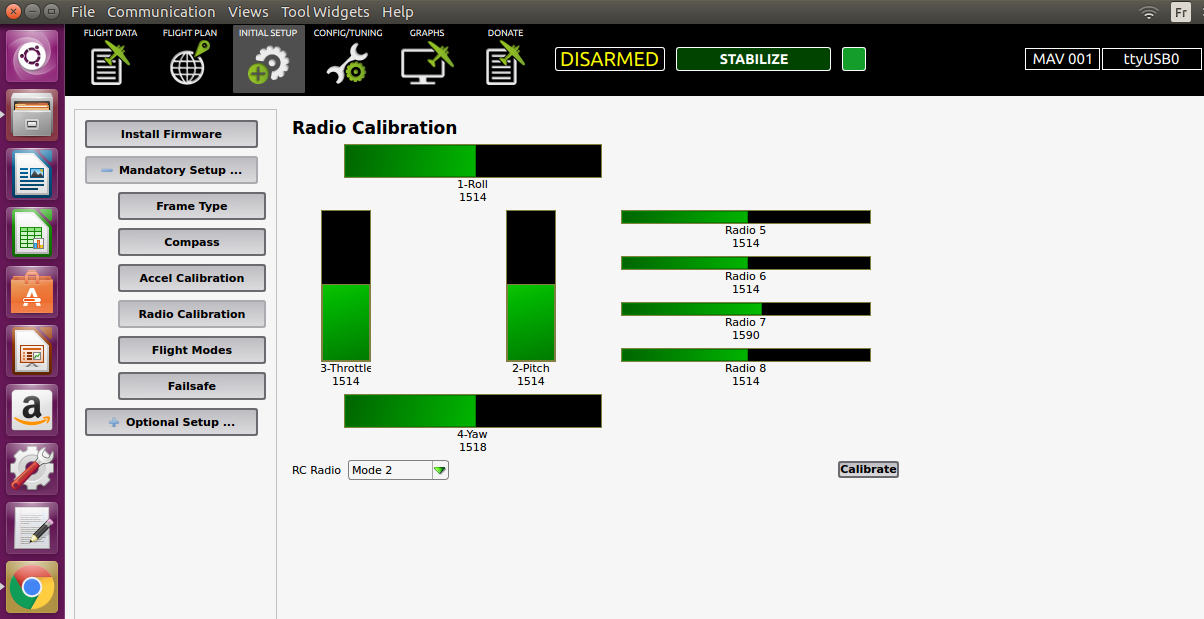
I installed all the material on the drone, I fed it with a lipo battery, then I calibrated the radio control,
but I have two problems
1- When I throttle throttle, without pushing the stick throuttle (throuttle = 0%), the motors starts to turn with a great speed as you can see on the video
—> where does the problem come from?
2- when I disarm the engines, there are two who still walk laying 10 seconds (propeller with index in blue) as you can see in video
ESC = electronic speed controller , the ones that plug into the motors and the pixhawk servo outs.
I think you’re saying you calibrated the radio.
The ESC calibration is a little different, it looks like your ESC servo wires and your radio receiver are easily accessible, so you should be able to plug each ESC into your receiver throttle channel one at a time and perform your ESC’s calibration procedure for each of them.
Also, if your ESCs can supply power through their servo cables (and it looks like they can) then remove and insulate the power wire from 3 of them, so only 1 ESC puts power on the servo power rail of the pixhawk.
Edit: I looked at your pic again and it seems like you’ve only got 2 wires to each ESC, so no need to worry about the power wire stuff I said - you still need t calibrate the ESCs though.
Hello @ppoirier, @xfacta,
you’re right, the calibration of the ESCs is different from the calibration of the radio
I calibrate the ESCs with the method -All at once calibration
There are always two motors, 3 and the 4 in a frame HEXA which turns for 10 seconds more after the disarmament
so I did the calibration -Manual ESC-by-ESC followed by an additional final automatic calibration
the speed of all the engines is the same, but at the moment of the disarmament there are two motors 3 and 4 which are running at a minimal speed (10 seconds),
is it safe to mount the propellers on the motors?
yes I configured it
as you can see on this little video where I put paper propellers, you can see that when I disarm the motors, they stop all, except motors 3 and 4 (10 second)
@ppoirier, Is it safe to mount the propellers on the motors, and fly the drone?