Sir,
Normally roll and pitch value of P and I should be same. In your case that not seen same.
If you have done many changes than start from below.
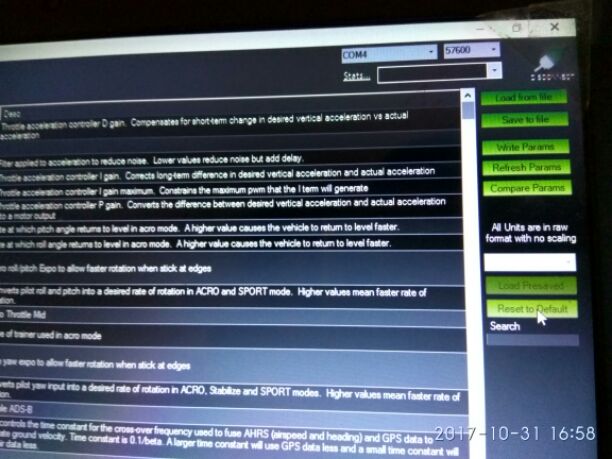
Now you can start reset all values by Configuration - Full parameter list - then you will find “Reset to default” . Than you need set all thinks like Fram type, Campos, flight modes etc.
If you think, that you can set value proparly than no need reset all to default to save your time.
Please set roll and pitch value of P and I same at nearly 0.12

What I obser, if motor are higher kv like 2300kv P and I value can start set from lover value like 0.10 than rise by gradually to tune, like 0.105, 0.11, 0.115, 0.12 etc.
If motor are low kv than mostly set in 0.18 to 0.2
I think you are using higher kv motor, for good start you can set roll and pitch value 0.10, than gradually increase.
Sir, you can increase simply way from configuration - Basic tuning

From here you can set roll and pitch value in single click from “roll/pitch sensitivity” button. I think this is best and easy way of manual tuning.
Some tips according to my personal experience.
Do that tuning in Loiter mode, this mode control lot of thinks to avoid accident like altitude and position.
You can start from lover value of “roll/pitch sensitivity”
When you strat and obser vibration at 40 to 48 % throttle at groud level , than you need lover down “roll/pitch sensitivity” value, than again try at 40 to 48 % than if you find no vibration than rise throttle just above 50% than copter will lift smoothlly and may be not need further more tuning.
Please share result so we can think on other points
Good luck Sir.