Hello to all …
Question from a newbie
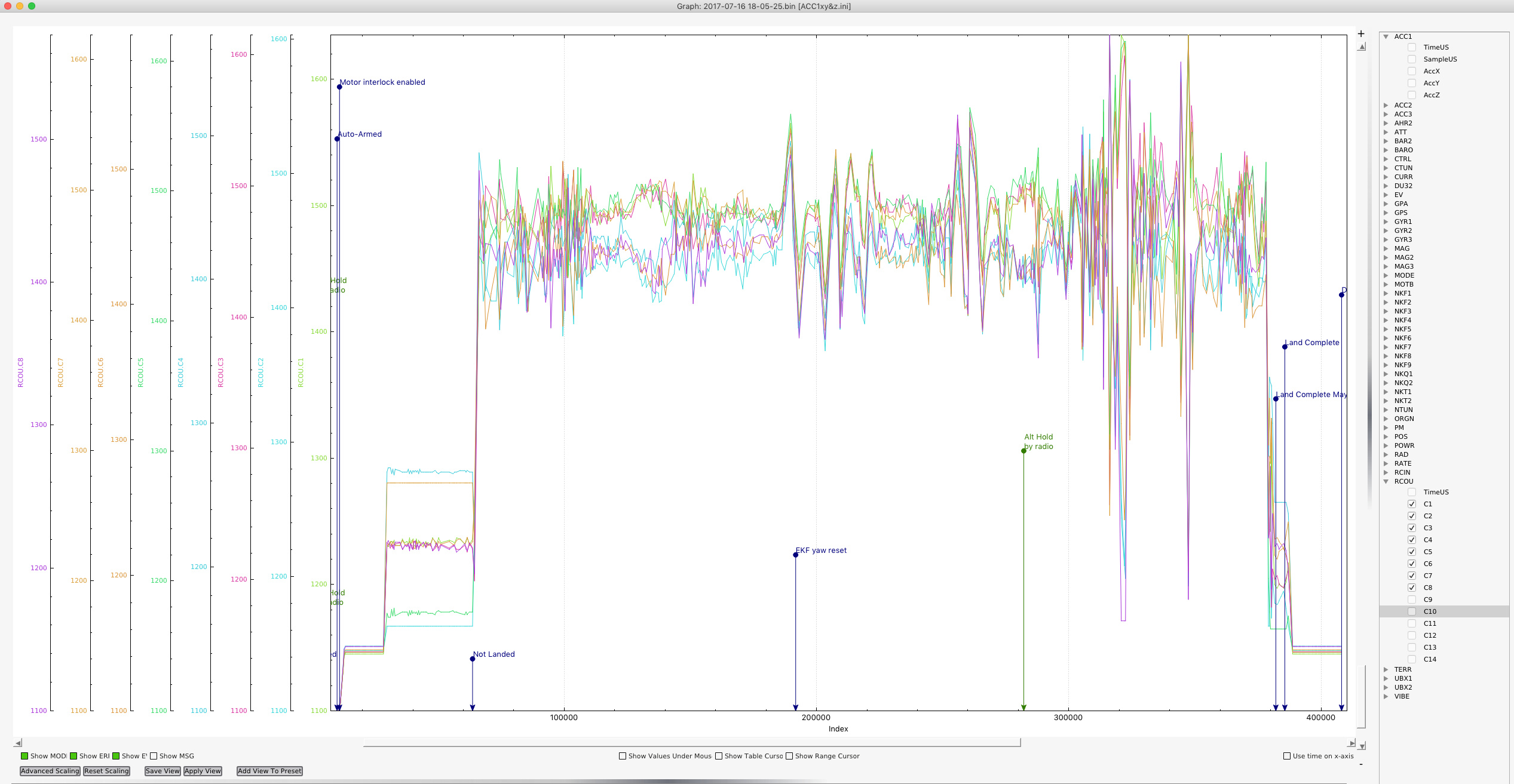
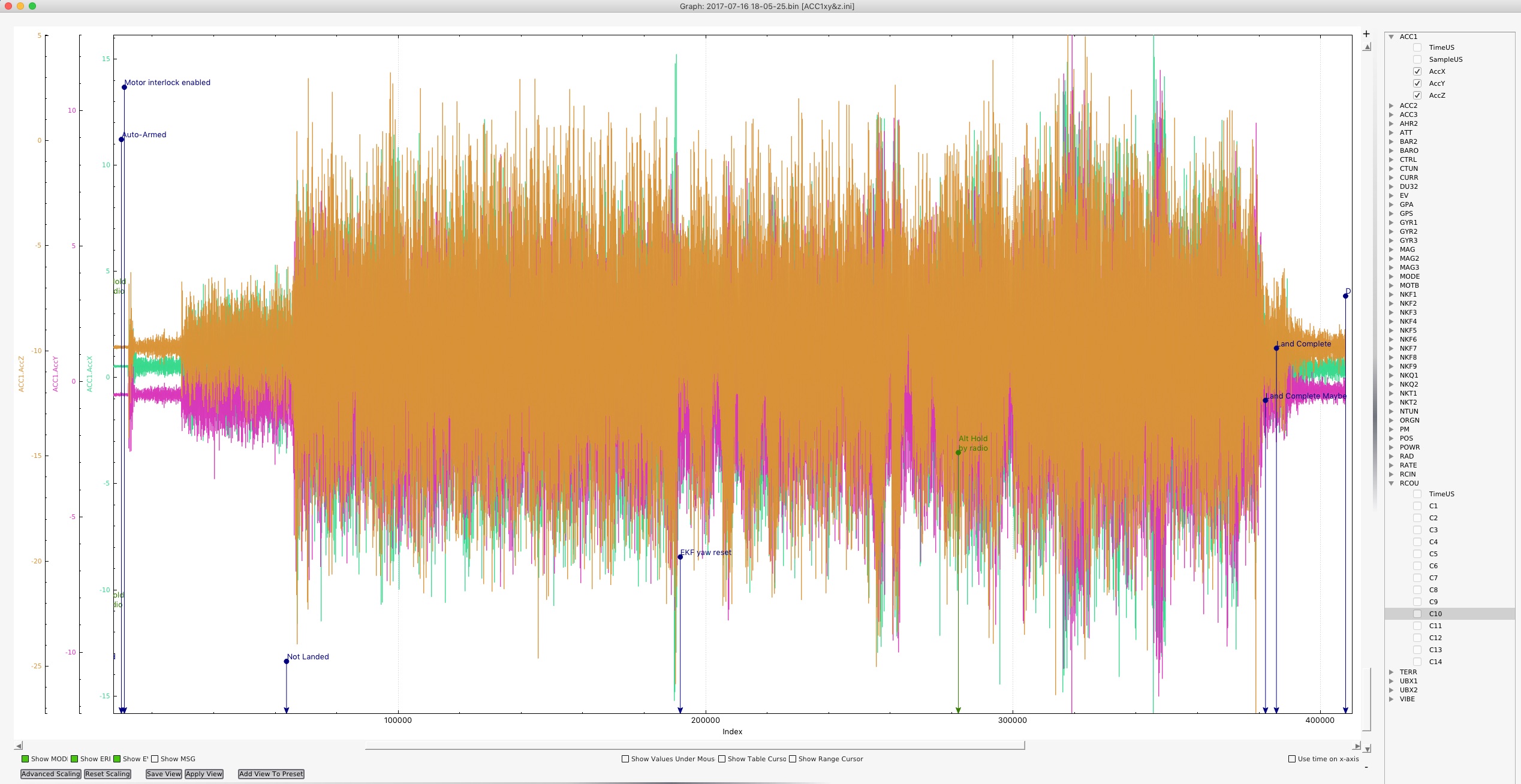
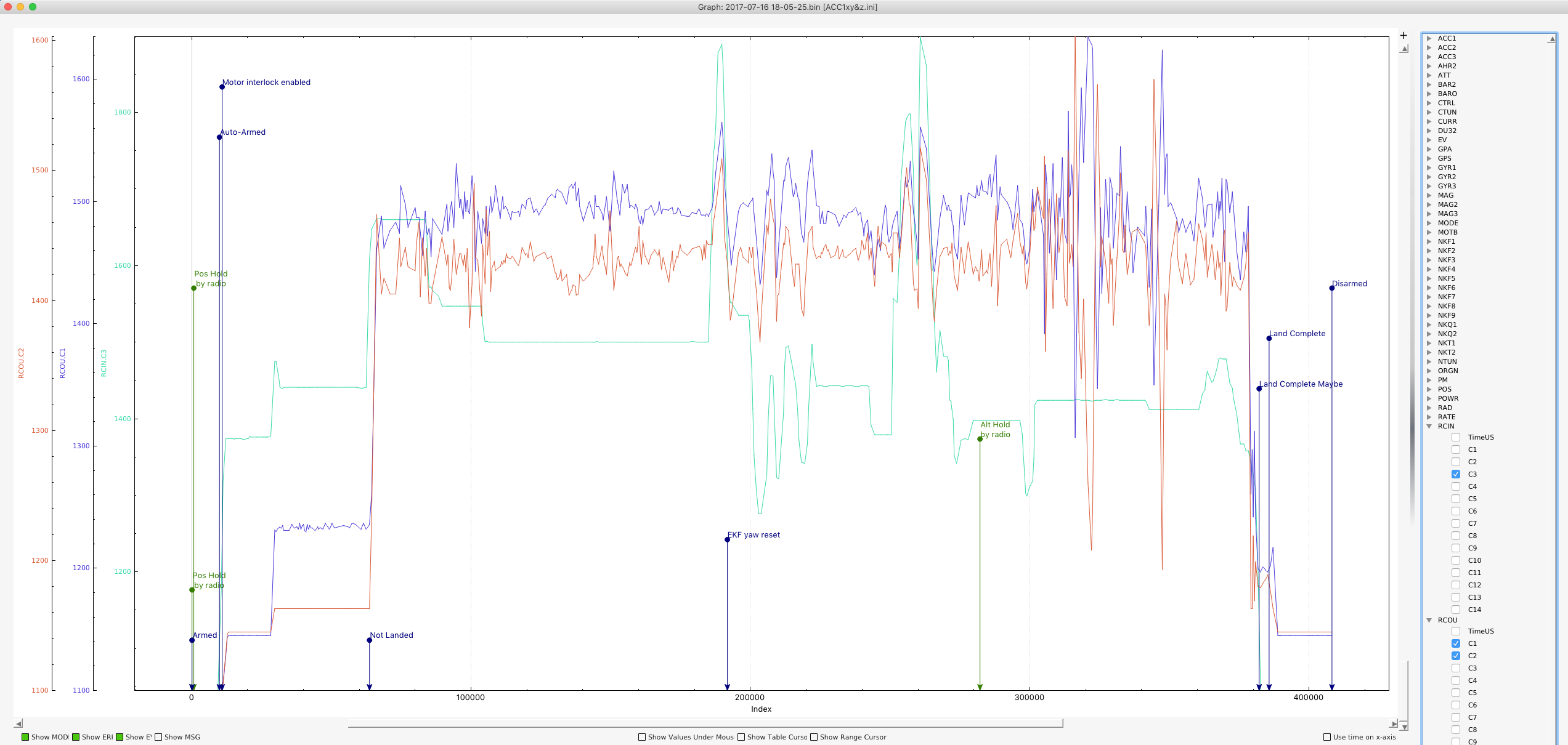
I have configured a big octo x8 … running up in stabilize mode makes the whole rig oscillate “a little ;-)” because motor rpm is jumping up too quickly … Hover throttle is set to learn and save … spooling up in althold or poshold is easy … will anyone explain how I may set the hover throttle also for stab mode correctly as I don’t quite get it from the ardu recommendations … I attached a log from my latest test hover (in poshold) on rc11 … Is also anybody willing to have a look at vibes please … are they within limits ?
The rig is foxtech devourer 130 with KDE 5215, 18" props, Herkules III esc board, 2 x 12.000 mAh SLS, no payload, reacting fine and crisp in the air …
Thank You so far … I thought vibes within a range of 10 were okay ?! Thought I read that somewhere …
And that’s what I saw when graphing the vibes with mission planner … What do You use for graphing ?
And the agressive motors didn’t occur during this flight … Just wanted to know if anybody could read out which hover throttle in/out I have for now and which settings would be needed to have a softer transition between idle and flying … I hope I explained it properly … ?
I don 't fully agree with the VIBES values all the time and generally look at the IMU data to see what the sensors are seeing.
I use APM Planner 2 for graphing as it has some good features and follows the easy to use Mac interface.
I had a quick look and the vibe levels are pretty low actually - way down at only 7m/s/s which is about half what my IRIS has. By the way, we have a VIBE dataflash message which is easier and better than looking at the accelerometer values directly. http://ardupilot.org/copter/docs/common-measuring-vibration.html
I actually don’t see anything wrong in the logs. My guess is that you may want to lower the MOT_SPIN_ARM and MOT_SPIN_MIN parameters. It’s discussed on this wiki page: http://ardupilot.org/copter/docs/set-motor-range.html