I’ve learnt a lot here previously, and now since I’ve started flying, I’m experiencing problems regarding flight.
Here’s my F450 frame spec:
Pixhawk 2.4.8
EMAX motors (MT 2213 - 935kV)
ESC: Flycolour 20A 2-4S LiPO, BEC 5V/1A
Battery: 2200mAh 3S 11.1V
GPS: M8N
I have been flying this recently and have crashed multiple times (1 major crash with mud entering the motors). Since then, I’m seeing motor balance issues in the log analysis as seen below.
Ignoring the above error, I have been trying to fly in -2 centigrade and 10mph conditions and while pre-arming, only 3 motors rotate, and I’m unable to fly my drone anymore.
Can someone point to the direction of resolving this issue? your assistance would be much appreciated.
Thank you
Size (kb) 2405.0
No of lines 29836
Duration 0:01:28
Vehicletype ArduCopter
Firmware Version V3.6.12
Firmware Hash cb570c06
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = GOOD - mag_field interference within limits (15.11%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERR found: FS_BATT
Test: GPS = GOOD -
Test: IMU Mismatch = GOOD - (Mismatch: 0.40, WARN: 0.75, FAIL: 1.50)
Test: Motor Balance = FAIL - Motor channel averages = [1547, 1675, 1338, 1549]
Average motor output = 1527
Difference between min and max motor averages = 337
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - FAIL: no optical flow data
Test: Parameters = FAIL - ‘THR_MIN’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
Update to latest Stable Version Arducopter . Auto Analysis is useless. Follow the tuning guide completely and post a link to the .bin flight log if you have questions.
My bad, thank you for your help, I would switch to cube orange as I have one readily available.
Apart from the flight controller, I’m also changing my ESC’s to SimonK 30A, and stick with the same motors. would that help me?
Thank you sir, I have ordered them (BL_Heli 32A and connectors for cube orange), and tried flying over with SimonK 30A ESC and the drone wan’t able to lift 1400g (total weight). Although I have changed my motors and used new ESC’s I still get “Motor Balance Failure”.
My PID’s seem alright as seen in the graphs, although yaw needs to be tuned a bit, but the rest seem fine.
As seen in ecalc, I would need to go for a 4S battery and higher kV (1200-1300) motors with 60A ESC, which would lift upto 1900g.
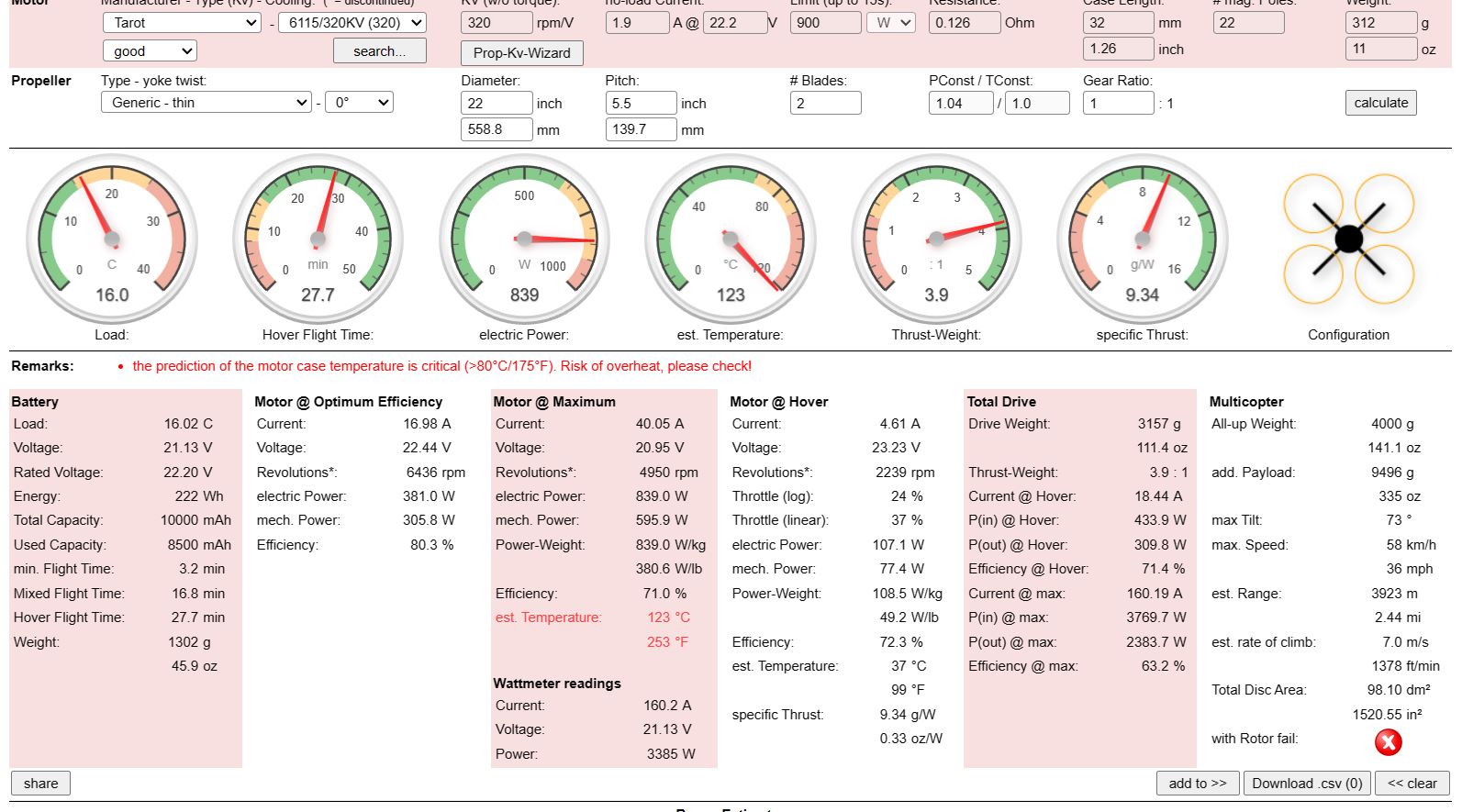
Hi @dkemxr , Since I’ll need to lift more in the future, I have opted for Tarot X4 frame and build it with the following configuration. (Why Tarot X4? Frame is readily available)
Tarot X4 configuration - reddit
When I run the configuration on ecalc, I have come across a warning of risk of over heating. Please see the image below.