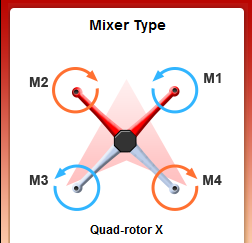
I have been pulling my hair out trying to get a Pixhawk 2.1 with ArduPilot 3.5 on a quad off the ground. My current test is an Quad X 4 with T-Motors MT3520-11 KV400 and Maytech ESC’s 40A opto. I am coming from DJI Controllers and I think this mindset has been the major problem as ever flight it wants to flip. What I mean by my problem, DJI shows the motor order as follows:
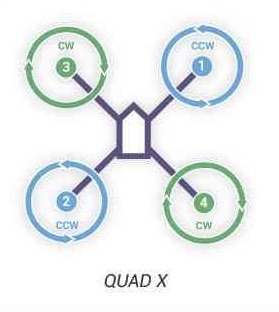
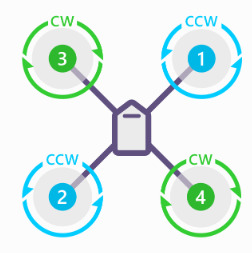
However, when I again checked out the motor order on Ardupilot.org I was presented with this diagram:
So I am going to ask a really dump question which I believe is the solution to my question. I presume that I need to connect the motor on the bottom left shown by Ardupilot as #2 to the #2 position on the Pixhawk and similarly for the others?
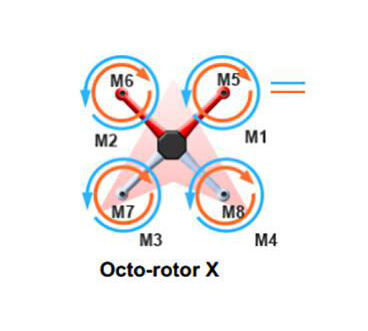
I believe I have had the same problem with an X8 between DJI and Ardupilot. DJI’s X8 order is:
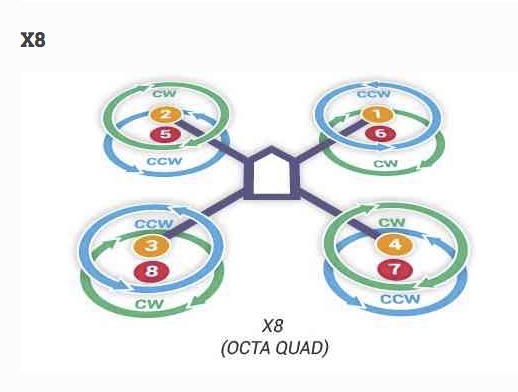
While Ardupilots motor order is:
For some reason, I looked at this before but it never clicked in my brain housing that I needed to rewire the motors according to the Ardupilots X8 diagram.
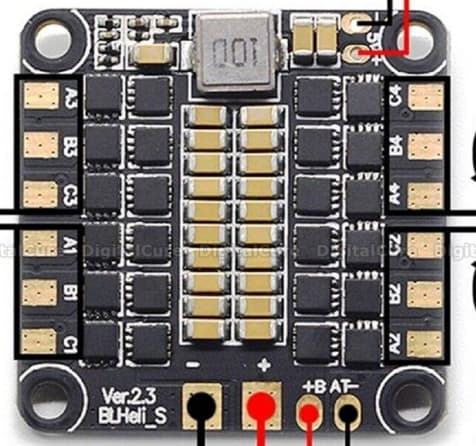
If I am wiring the F405 TE to a generic 4-in-1 ESC, should I also follow the Arducopter order?
and match the ESC numbers to the Arducopter diagram shown here?
Thanks a lot. SInce the cables from the motors are not long enough to reach the ESC, I am adding some 2mm banana plug connectors and that will allow me to make changes easily!