Hi again guys,
As the description says, I am still having issues with this mini carrier board… I thought I had solved them yesterday but I spoke too soon…
I have two aircraft, one is a custom frame we printed, and the other is a CF frame found online, they both carry the exact same components: Cube 2.1, 4-1 BLHeli 35A ESC, Here2 GPS… They have different motors and props though.
I have all of the sensors calibrated, I also calibrated the ESC twice to ensure it was done (I had forgotten I already did it), my props are balanced, my motors are brand new, etc.
When I go to take off, my quad is trying to flip over and is acting like I have a motor on reversed, or a prop on backwards… or like I have the motor signal wires switched around on the FC
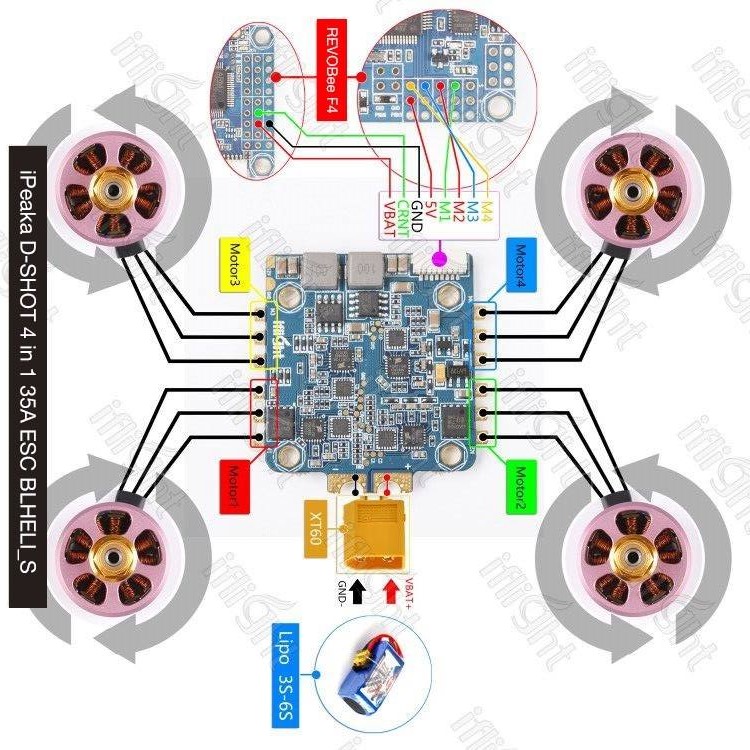
I have triple checked all of this, my motors all spin the right way, my props are on right, I followed the motor signal wiring diagram from the ESC datasheet… I even verified that the correct motors were plugged in one by one by plugging them in one at a time and then testing them to see which one spun. I am following this diagram and I will share it for you guys to take a look at.
I’m wondering if anyone else is having this same issue with their mini carrier? I am at a loss at what to try next
Also,
I was told this diagram is incorrect so I followed the mission planner /ardupilot schematic which shows different motor numbers, that also did not work.
It would be helpful to see a log from the failed flight attempts.
Have you adjusted the _FILT parameters to suite the size of the craft.
From your description I am assuming small copter, overpowered running 4S, correct?
Have you armed without props on and checked the TX stick movements have the correct effect.
And while running, tilting and the low motors speed up, high motors slow down.
With the smaller stuff I have even held the copter above my head while someone powered up and checked lift and direction.
This was a problem build with the BLHeli.
Due to our short time frame we ditched them and put in standards and all was good.
I can get some logs up, give me a few mins and I will post them here in the thread.
It’s a small copter currently trying to run a 5s battery, 18.5v, it is a 5S-1P LiPo
the motors are 460kv turnigy Multistar motors with 9" props
I’m actually trying to underpower it a bit so it isn’t “racer like” and I have other batteries I can try as well, 3S batteries.
I haven’t yet tried to adjust any _FILT params, I’m not really sure where to start with those honestly.
I have spun the motors without props on and they all spin the correct way, the props are on correctly as well, I looked at them several times just to be sure.
Have a look at ATC_RAT_PIT_FILT and ATC_RAT_RLL_FILT
For larger copters we reduce these from the default 20 to about 10 (depending on the size of the copter)
And for racing quads they can go up to 40.
But running 9" props you should be able to get it flying with the defaults, so there should be no need to change those parameters.
A 3S on a 460kv motor with 9" props isn’t going to get off the ground.
Normally 9" to 12" on 3S running 800 to 900kv motors works well.
As you have about half that Kv maybe 6S is the way to go.
Have you tried punching git off the ground.
Or do you carefully throttle up to lift it gently?
Mike,
I haven’t changed the filters yet, as you said, it SHOULD be able to get off the ground with the stock filters. My other quad that is the same size and same components (but with different motors) can fly perfectly fine with the stock PID’s.
I’m running a 5s battery currently, its a 2500mah, 18.5v.
I haven’t tried aggressively taking off, I was afraid it might just lose it’s mind and auger into the ground, haha.
I was following the motor wiring diagram of the ESC and it was wrong from the PixHawk specs. Rewired so that it follows the pixhawks A,B,C,D motor layout and it flies. Doesn’t fly great but it’s in the air… Stability mode is good, Loiter mode doesn’t do a great job of holding position and height but it’s “okay” and useable for now. Wondering if an Auto Tune might help with that
Hey Mike,
I actually tried auto tuning today and I can’t quite figure out what’s going on… If I try to auto tune in Alt. hold, it pretty much just runs away, which i know is fairly normal but I cant keep it in my area of flight long enough to really even let it tune. If I try it in Loiter mode, it does fly around in the circle and it seems to do it’s roll tuning as it should, but it never moves on to pitch or yaw… it just keeps flying around in a circle and from what I can see, roll tuning. ive ran the battery down to about 18.5v from 20.7 and it still hadn’t stopped roll tuning yet, that was about 15 minutes or so of flying.
also, here are a couple logs if you wouldn’t mind taking a look? I’d love to get your input on a couple warnings I am seeing. both of these are from separate flights
I note you are switching modes a lot.
In the parameters you can set one axis to auto tune at a time.
My preferred method, and I did it in gusty winds yesterday to a 450 size:
Wait till you have a good GPS lock.
Take off where you have plenty of space and put it into Loiter.
Check it is stable and switch to auto tune.
Don’t touch the sticks until it is finished.
What do you mean by switching modes a lot?
I don’t actually switch out of any modes myself, unless it switches by itself when I use the sticks to move the copter back to the area I want it to be inside of