Hello,
do you think a minimum Throttle percentage of 14% is ok? Values below 14% do not cause the motors spin.
I have a T-motor 605-X (Integrated Propulsion System) with Alpha 60A HV ESC and MN605-S motors. I haven’t made my first test flight yet.
Hello,
do you think a minimum Throttle percentage of 14% is ok? Values below 14% do not cause the motors spin.
I have a T-motor 605-X (Integrated Propulsion System) with Alpha 60A HV ESC and MN605-S motors. I haven’t made my first test flight yet.
Yes, that seams plausible
What are your related parameters though?
Would it be these values?
MOT_THST_EXPO,0.4
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
MOT_THST_EXPO = 0,76
MOT_PWM_MIN = 1000
MOT_PWM_MAX = 2000
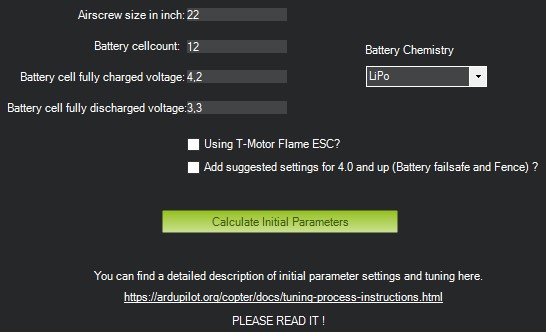
I will fly with 22" propellers.
Definitely set those values I provided. I’ve seen a lot of logs of the new T-Motor Integrated Motor/Mount/ESC and MOT_THST_EXPO,0.4 seems to be right.
The PWM values are definitely required.
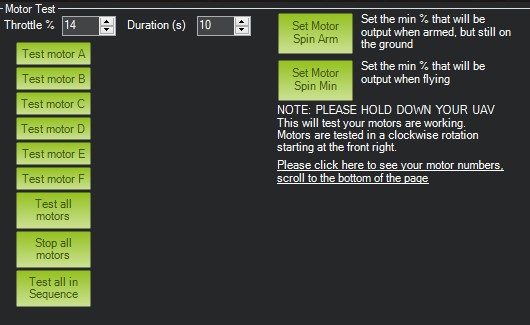
After setting them reboot and use the Motor Test to recheck
MOT_SPIN_ARM and MOT_SPIN_MIN
they will be different now.
After entering your settings, the motors spin at 5% Throttle. I think Throttle now scales better.
Thank you.
What did you save for MOT_SPIN_ARM and MOT_SPIN_MIN ?
About 0.08 and 0.11, something around there?
OK, but the idea of the motor test is to find and set MOT_SPIN_ARM
So if the motors will spin at 0.05 you probably want to add some margin for error and use 0.08
And then you want to make MOT_SPIN_MIN about 0.03 higher, at least until further flight tests are conducted.
Ultimately you need MOT_SPIN_MIN high enough that props wont stall with wind gusts or descent, but low enough that you can still actually descend and reliably land.
Just set MOT_SPIN_MIN = 0.13 and it can be adjusted later if it’s a problem.
If you had previously managed to do any flights, MOT_THST_HOVER will need some time to relearn after these changes.
Thank you for the information, I think I will be able to make a test flight this weekend at the earliest. After a correct flight, I will proceed to PID calibration.
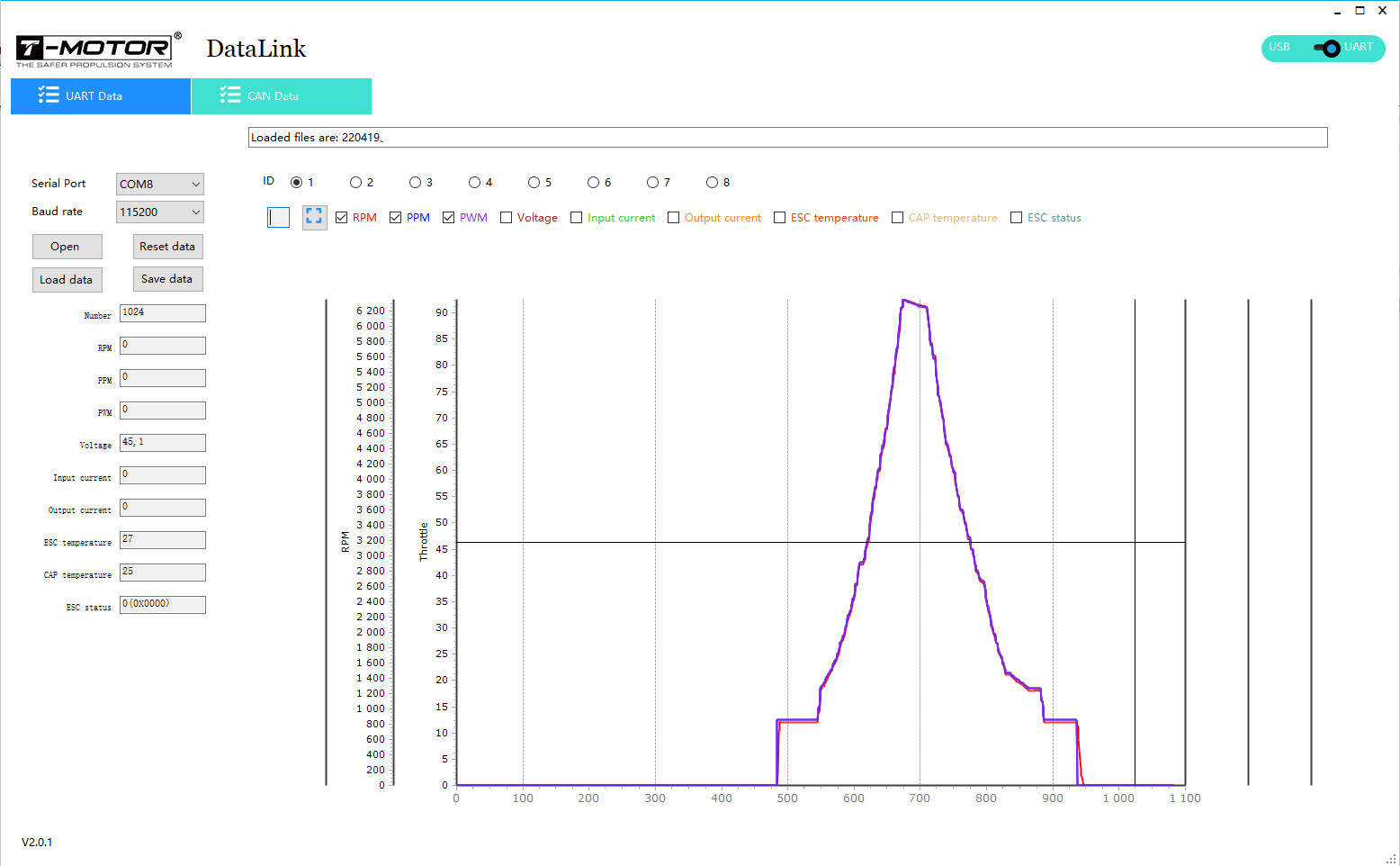
I have all motors on board connected to Data Link V2 and I am able to read telemetry data from the ESC. The values can be transferred to the following table. Am I thinking right?
Never used that method myself.
I do know from some experience that those Intergrated motor/ESC units you have work well with MOT_THST_EXPO,0.4
It would be good if someone could gather the real data - you need a thrust stand to do it though.
I think the manufacturer should have such data.
They have only partial data, because usually they do not test the exact combination of your ESC, motor and prop
One other thing is that unfortunately most people talk about MOT_THST_EXPO but that is only half of the story. To fully characterize a motor you need MOT_THST_EXPO and MOT_SPIN_MIN . They form a pair and one depends on the other. We really, really need to start using both together every time we talk about linearization in a ArduPilot context
What good is it w/o thrust?
Hey, did you get that Data Link V2 for free when buying the Motor/ESC’s? I can’t imagine paying $150 for one.
It is worth the 150 $ once it is integrated in ArduCopter. Peter Barker and Pierre Khancir are working on it for months now, and AFAIK without any support from T-Motor.
I would really like if T-Motor would do some kind of progress reports and a tentative timeline, so that at least see that something is moving.
One can hope . …
I bought without tax in the EU for 128 Euros. If it manage to connect to Arducopter, I’m counting on something special, e.g. live update charts.
Try the PR from Peter Barker. It adds Holybro and T-Motor telemetry. I can not test it because I no longer have a copter with Datalink.