I was flying a hex-copter frame yesterday. Since the Main out pin2 was not working, I mapped Auxiliary pin2 to motor2 output by changing servo10 function as 34: Motor2.
The copter took-off fine and executed its mission in AUTO mode, but after 20 mins of flight, motor2 suddenly stopped.
Want to know why this happened? Any help would be appreciated.
Without a binary log file we can only speculate. We do not like to do that around here. Please provide the binary log file.
What do you mean by “pin 2 wasn’t working”?
The pin number 2 of mainout of servo rail of our pixhawk2.1 was damaged. We observed that whenever we connected ESC’s power and pwm pins simultaneously, the corresponding pwm output of pixhawk servo rail gets damaged and no pwm output is generated henceforth.
Hey @aannurag
I went through your log. Can you please share more details on your power electronics? How are you powering Pixhawk Cube, what power module?
Preferably a picture of pixhawk cube connections.
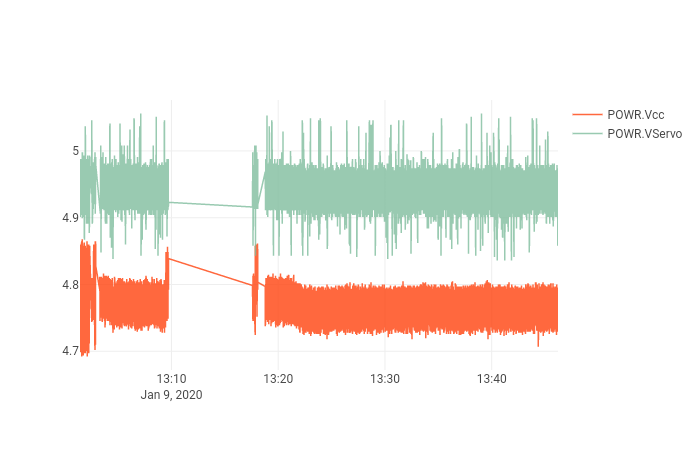
The Vcc is lower than usual. Vservo is your BEC voltage. You haven’t setup power module and it’s hard to gauge your power consumption.