So I pull my throttle down and the motors still spin for a few seconds. I have sky walker 20 esc on this quad and have calibrated them with mission planner.
After disarm?
In what mode are you?
Post some logs!
Run in stabilizer mode. its before disarm, I have the motor spin set so they do not spin when armed. I can land and kill the throttle and the still run fro a second. Video of it
Interesting. I wouldn’t know directly what it is, the video helps a bit but it would be great if you add a log of it too. I’m not saying i will be able to help you, but i’ll take a stab at it and others will likely also take a look! 
In the log you posted, i basically see this at the end:
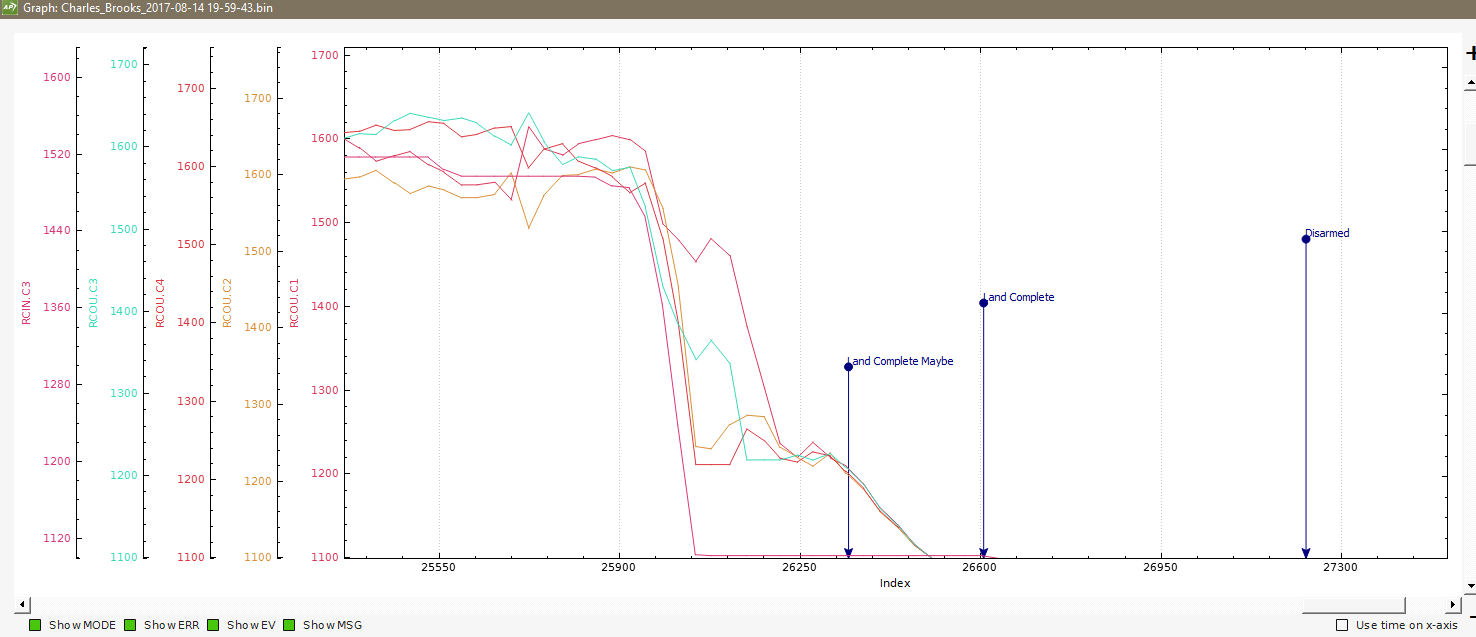
So, i also see that you throttle down all the way, but than stabilize slowly powers down until it’s landed and then disarms.
I would say tihs is normal, but i agree that there’s a bit of delay. If you enable the time, then you’ll see that this is just a second or 2.
A while after that it disarms.
Since when is this happening?
I just threw a small bin file. I think it was the one when i made the video. I have noticed this on my setup over a year ago. I don’t have much time to devote to the quad anymore. I threw the new ESC on it at teh same time and thought that might be part of it.
The video and logfile of that video should help a bit as we can compare timing. It would not surprise me if the ESC is doing this. Will take a look later!
I also like to set mot_spin_armed = 0 on my copters and on my old setup (APM / 3.2.1 firmware) motors were stopped immidiately with throttle down to zero.
When I upgraded to Pix / 3.5.1 (changed my ESC as well) then I noticed the same 1-2 second delay too.
I just thought it’s by design in the recent arducopter firmware.
Thats my story also.
Likewise…I seem to think this has been the case for some time. My quad with APM 2.6 used to do it too.
What is the value of MOT_SPOOL_TIME in your config??
This is the time taken before the motors spin
Similarly when disarming ,it is the time before motors stop
It’s set to 0.2. But this is the spool up time. Not spool down time. [quote=“R_Q_Robert, post:12, topic:20046”]
MOT_SPOOL_TIME
[/quote]
Guys I had the same problem. Moreover motor stopping delay caused tumble on landing in my case.
Now I guess I found the problem - it is MOT_SPIN_MIN parameter. When set value greater than zero (default is 0.15) motors spins for a while even the throttle is cut to zero. The greater MOT_SPIN_MIN is the longer motors spin after cutting throttle. With zero value motors stop exactly
Hope it will help to others.
I don’t see anything wrong here. Besides that, other than doing a valid motor test using Mission Planner > Initial Setup > Optional Hardware > Motor Test, bench testing with no props on is totally useless…
Put some props on it and go fly…
I could be off base but if the craft is tilted way off level the motors could be adjusting for it and not shut off.
@ Charles_Brooks
"It’s set to 0.2. But this is the spool up time. Not spool down time.
MOT_SPOOL_TIME"
I remember it was spool up time as well as spool down time.