Hi,
I completed the maiden flight of my latest Octo (14kg weight without payload, 24" Props) recently. It seems to be quite well powered and hovers at THRO of ~ 0,15… actually better than I had calculated.
I completed autotune on all three axis successfully (still with the FLT setting at 20Hz) on one battery.
After that the flight performance subjectlively was a bit too twitchy on roll/pitch. I will retune with the 10Hz setting next time as suggested by Leonard earlier and maybe lower RC feel and autotune agressiveness - but I am happy with what I have already and I know what to do next on this.
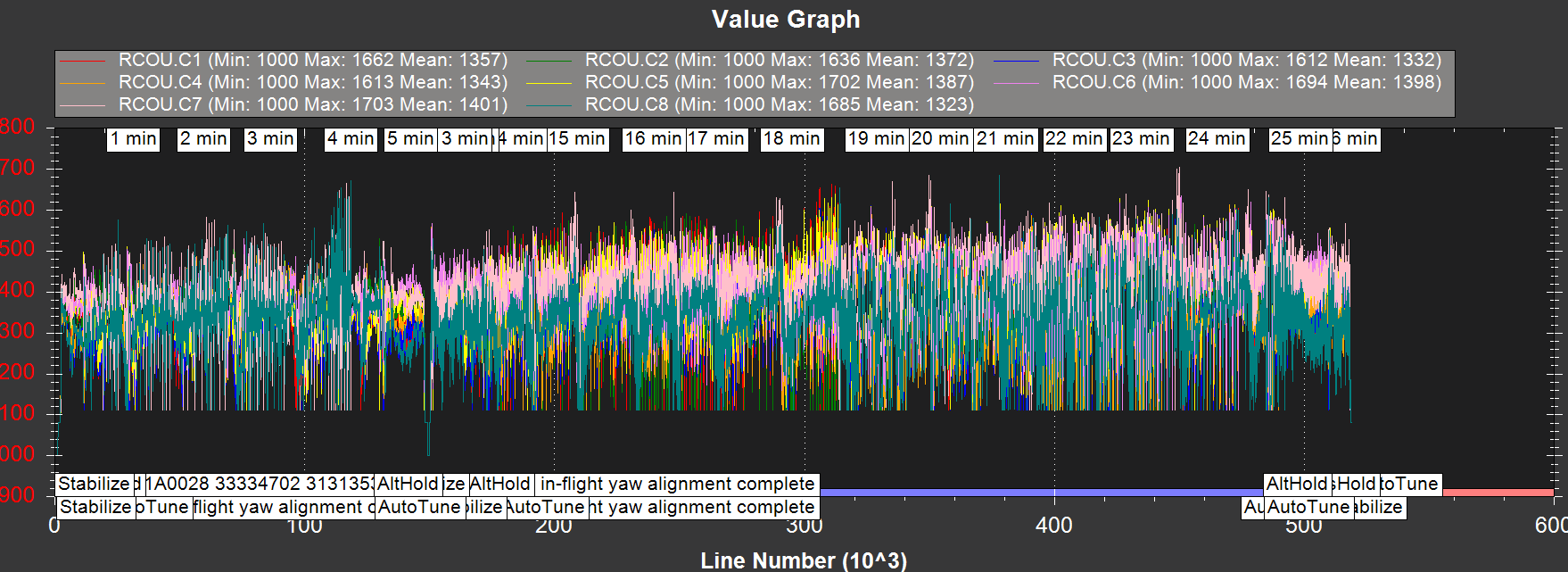
Yaw behaviour was subjectively not quite as “tight” after the autotune so I had a look in the logs and was surprised to see that the motors (RCOUT) seem to go into “low end saturation” a lot during the whole fligh, i.e. they go to THR_MIN a lot of times during the flight.
The log can be found here: Flight Log Maiden Flight
Is this the reason for the subjectively a bit sluggish yaw performance?
Is this an indication of a more fundamental issue?
Any suggestions on how to improve the situation?
Thanks for any words of help or consolation 
Christian

