In my quadcopter I’m getting variance in PWM during hover.
Can anyone suggest/ tell what is the cause for this PWM variance and how can i eliminate /troubleshoot this.
Reduce vibrations and fix YAW imbalance. Both are extensively discussed in this forum.
2 Likes
Hello @amilcarlucas , I’m encountering a very similar issue. I have a quad build with an AUW (All-Up Weight) of around 7 kg and 24-inch props. I’m using a newer Cube Orange +. What’s strange is that I had a previous build of the same kind with an old Cube Orange, and the newer build is experiencing more vibrations than the previous one, even though everything appears to be similar. I’m attaching the data flash logs for your review. Please take a look.
Data flash log
A torque split like you have is a sign that the motors are not aligned or leveled. Fix that first. All the motors need to perfectly level relative to each other. If you are using round arms this could be a problem. Easy to fix by rotating the motors, but it takes some time and attention to detail.
Once the motors are leveled then sort the vibrations. The two problems may be inter-related so fix the arms first.
Then revisit the tuning guide. There are oscillations in the tuning but there’s little point in working on that until the motors are leveled.
1 Like
Hi
Thankyou for your support, But in my case I’m using a straight edge to attach the motors, so in my case motor twist won’t be an issue
For some reason the torque is not equal between the CW motors and the CCW motors. If you are sure the motors are leveled, then you need to look at props or something mechanical. If that split is happening, but the quad isn’t spinning around, then there is a mechanical imbalance that needs to be addressed.
2 Likes
Hi, As i said this is the second build of the same copter and it used square tubes for mounting motor. Today i rechecked the motor levels as well as weight imbalance. There can be shift in cg which i would say in a limit of acceptable range for multi. I did a full firmware reflash and once again did all calibrations and performed a flight the PWM shift still exists. Please have a look at todays log.
Is there anything i need look on tuning related at this stage my doubt
How many steps of Methodically configure and tune ArduCopter have you slipped? Which ones?
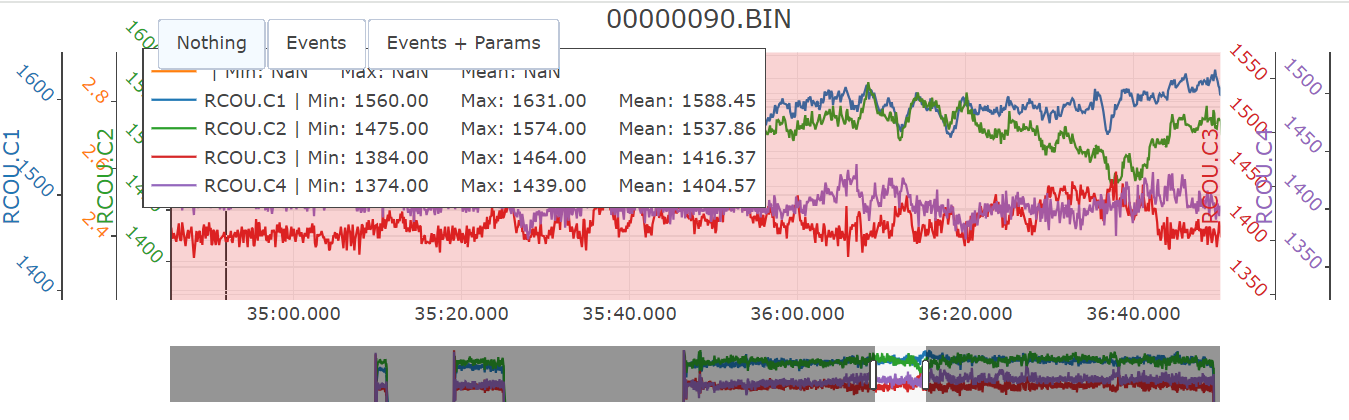
I don’t see the torque split in this one, but the C of G is way off. That’s an unacceptable difference in Motor 3 relative to the other motors. Was there significant wind during the test? If so this data would be of limited value for troubleshooting an imbalance.
I’d also say this drone is underpowred or overweight. For a hover it would be normal the PWM values of the motors to be around 1500, but since 3 of the motors are over 1700 for the majority of the flight (hover) suggests you’re going to run out of control authority soon if you add payload or try to fly faster.
1 Like
Thank you for quick response.
Update:
Initially as @amilcarlucas suggested, I was having 1-2° offset in between motors, I addressed motor alignment issue by leveling all motors, but was still facing similar sort of issue.
As @Allister mentioned my drone was under power and overweight too, similarly CG was a bit off centre so this might be the reason behind the crash I faced.
I used to fly my drone without payload, observing bareable PWM variation (Ranging from 50-80) and it fly’s in between 1450- 1600 PWM range.
Once payload is attached, variation between PWM goes upto 250-300 . (1750- 1950 PWM)
Can you post a .bin log file and answer my two questions above?
And answer the questions
Heyyy @amilcarlucas i guess those questions were there for @Sagar99.
So far not,
I’ve checked for yaw imbalancing, but it took me no were.
I’ve also reduced vibration but still I’m getting similar sort of thing.
I’m doubted about motors, as they sustained a crass from 100m alt. Their are some visible dents on motors. I’m also thinking of manufacturing new frame to find the root cause.
I’ll update here if I’m finding anything
Well, there is a clue ![]()
Trying to replace motors on existing frame
Will update here
Are you trying to do a dihedral to your drone? If yes, do you think you have done wrong in the angle tilt direction? As a result, FC to counter auto-yaw, spin Motor 3 and 4 slower in Quad X configuration.
@Swatej , you are using CubeOrangePlus, Arducopter V4.4.0, may I know why you still prefer EK2?
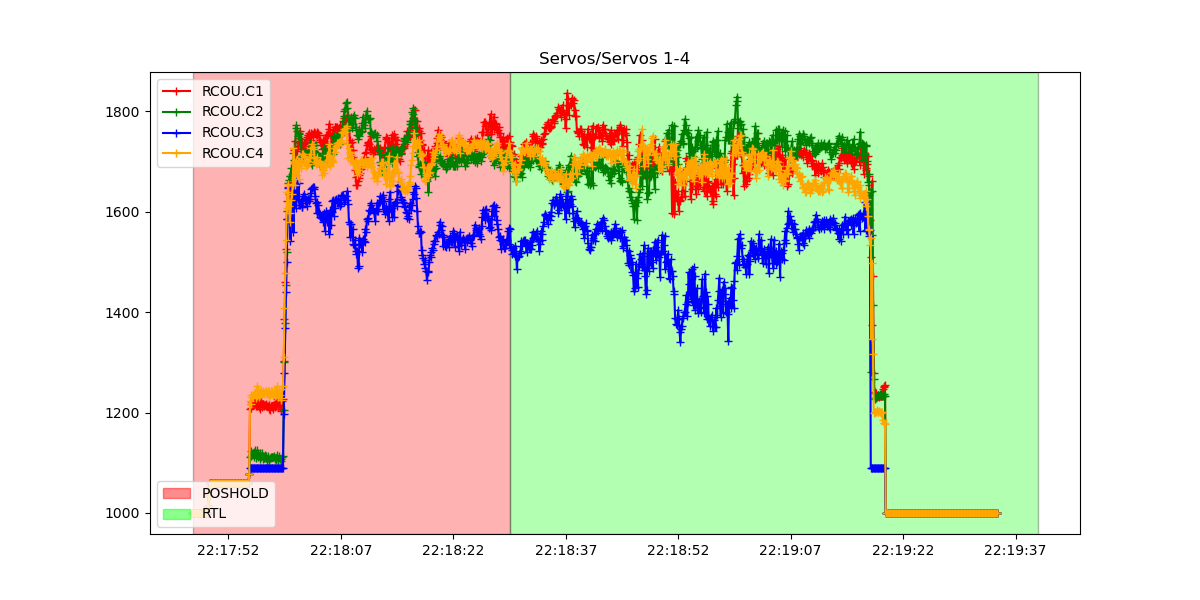
@Sagar99 , your DFLOG.bin to log_55_xxx improvement is on your motor 4. so likely Motor 3 following the motor 4 fix may resolve your motor RCou issue. My guess.
Your drone frame vibration is high.