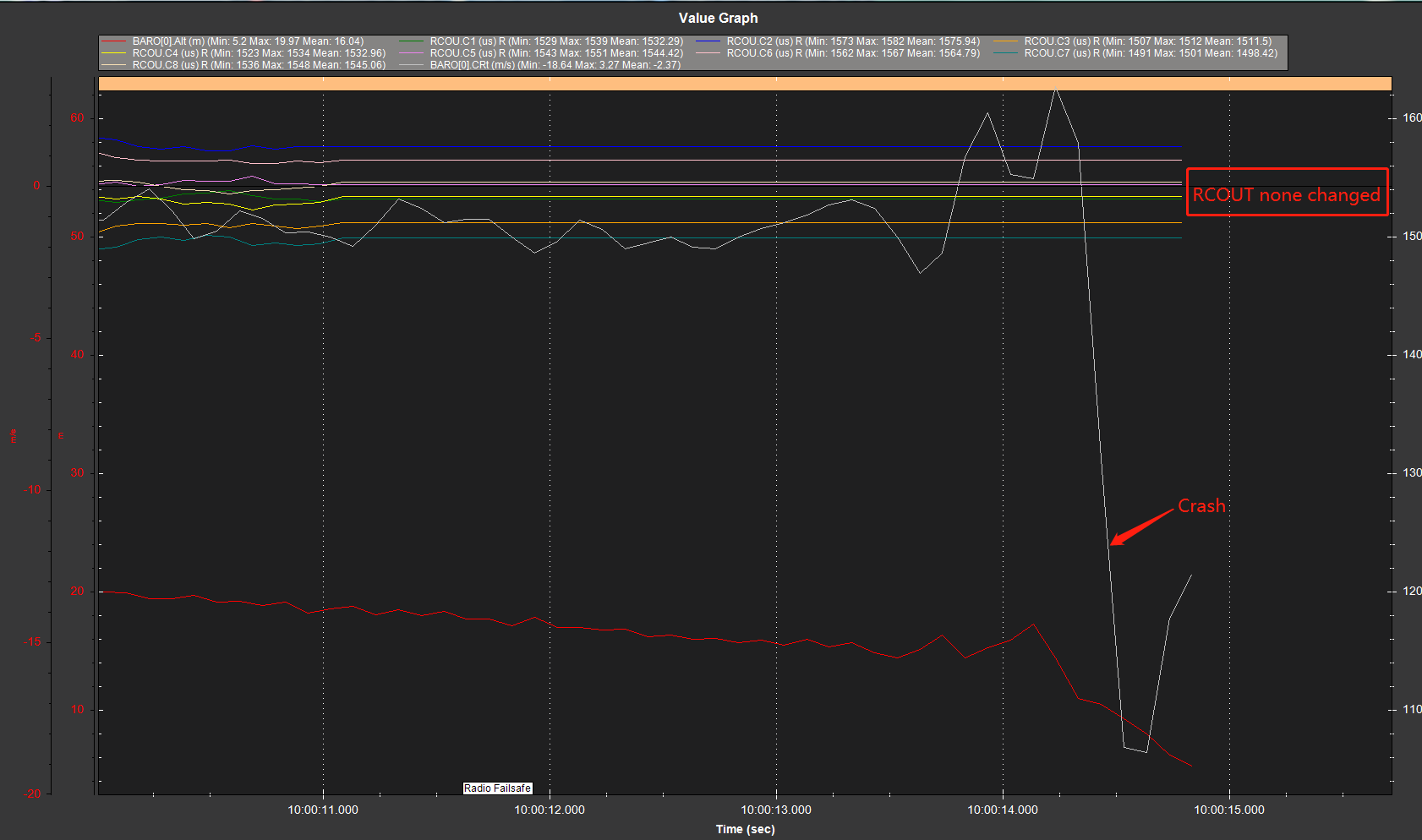
The copter suddenly crashed during descent in RTL.
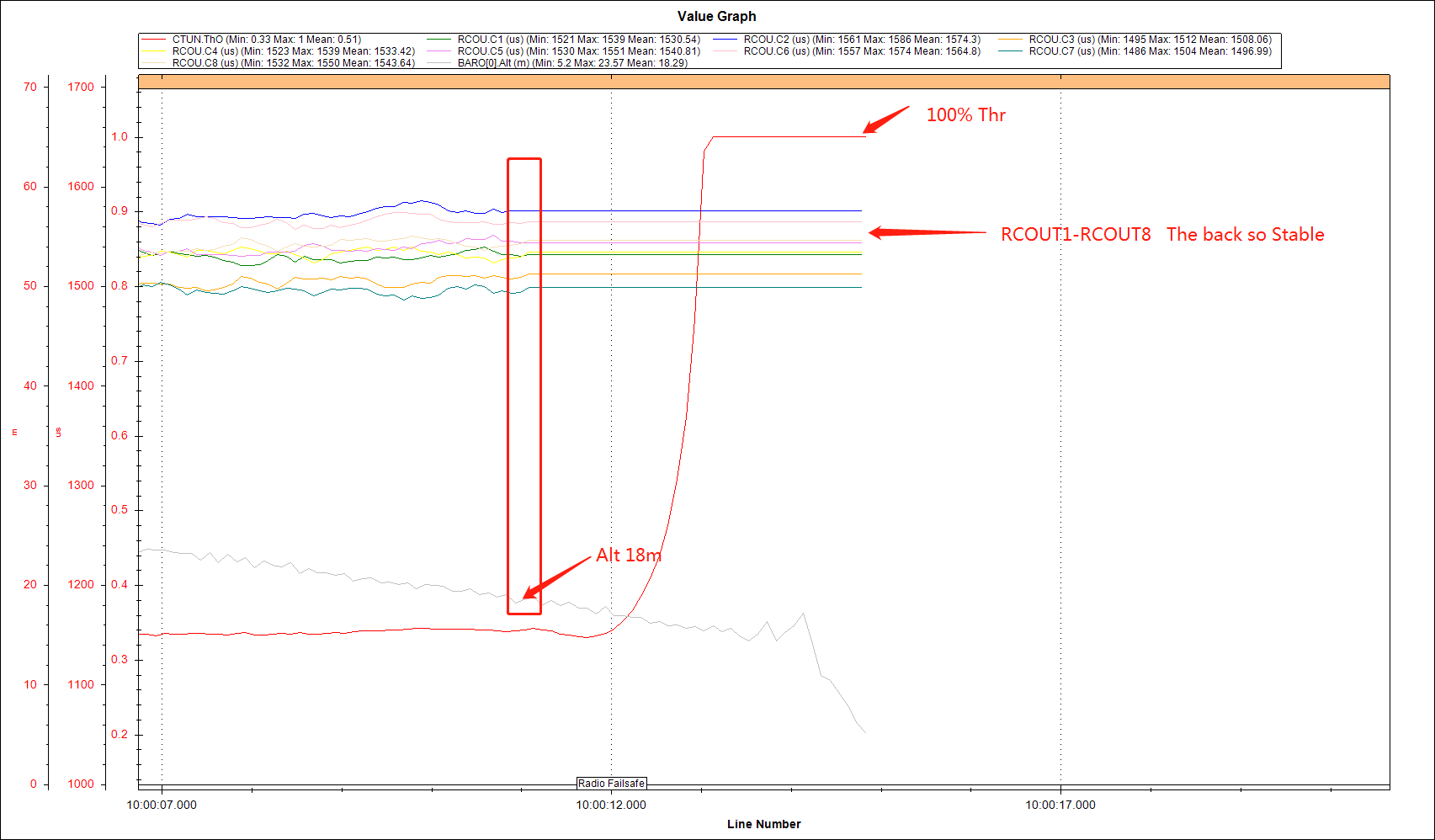
The log shows that the Copter has attitude records, the throttle has risen to 100%, but the (RCOUT) motor output has not changed.
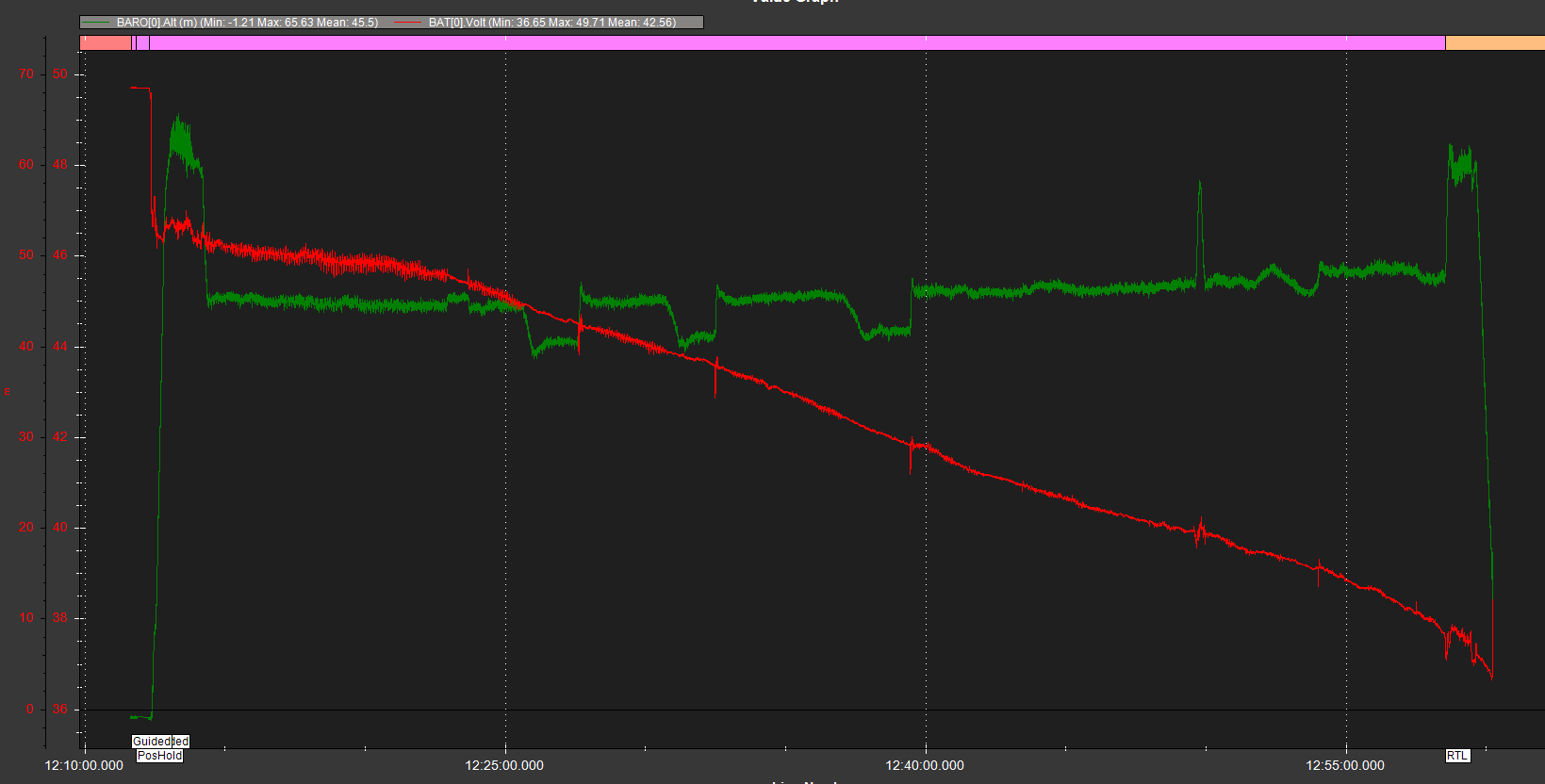
I think what you have done here is run your batteries too low. For a 12s setup which it looks like given the start voltage the lowest I would go down to is 42.2v and during this flight they got as low as 36.7ish volts. I suspect that your ESCs or other components may have just hit a low voltage cut off or something to that effect.
@Carapau
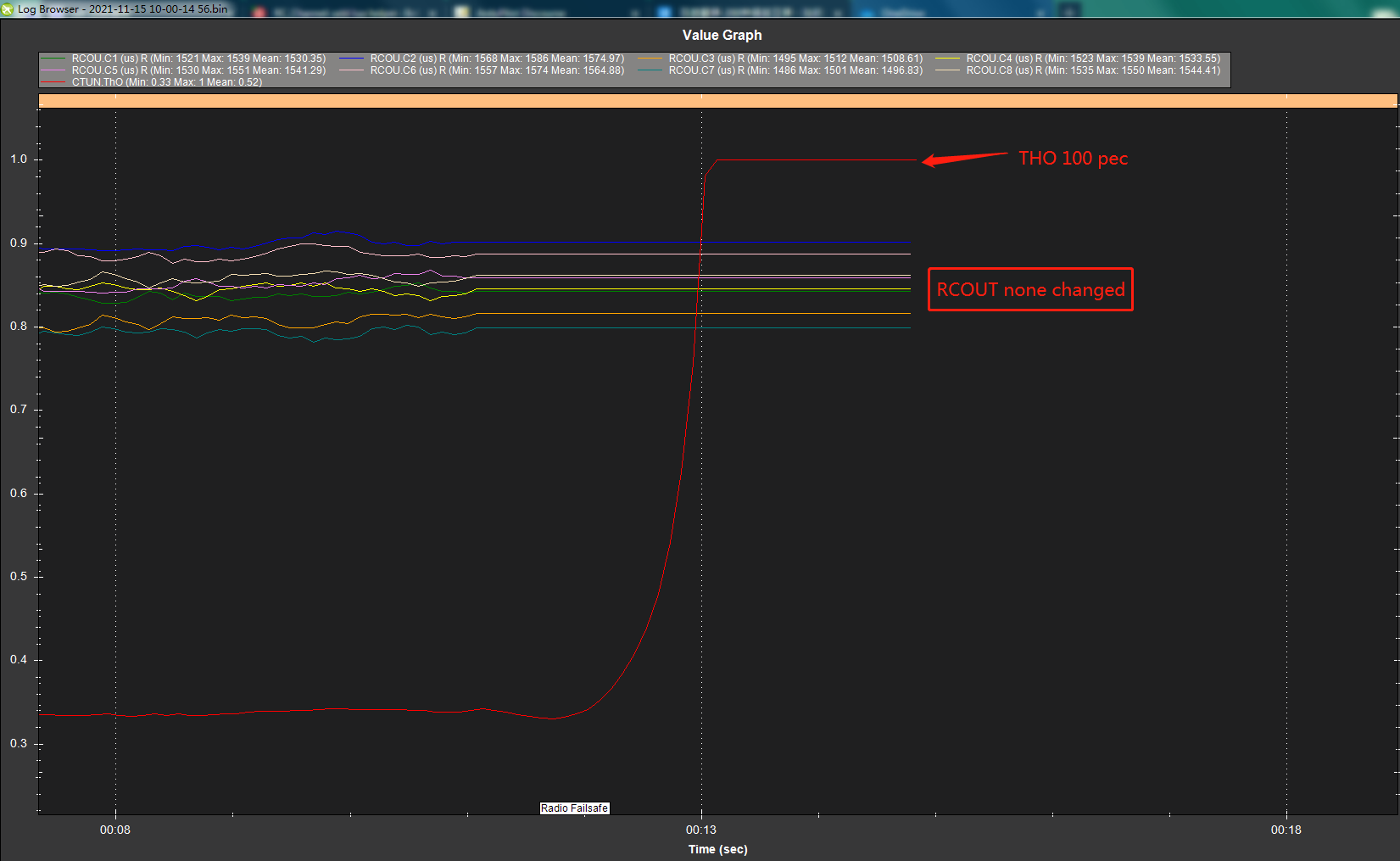
The battery voltage is indeed low, but the calculated throttle of the copter does not match the motor quantity of each channel. At full throttle, the motor pwm control value will become large.
Because of the low battery voltage you get a ‘brown out’ on the flight control board. How your FC handles this I am not sure. Maybe the low voltage to the board has caused it to halt outputs to the servo rail?
Yeah! The 5V voltage is not low and can normally supply power to flight controler. Rcout is calculated by flight control. When the throttle is large, rcout should record a larger value.
test the accuracy of you voltage readings from the “power brick” and use MissionPlanner Battery Monitor section to put in the correct measured voltage.
Use a low voltage, like use a 6 cell battery or a bench power supply for this calibration process. Don’t calibrate with a fully charged 12 cell.
turn off any low voltage protection in your ESCs if possible
correctly set ALL the battery related parameters For 12 cell Lipo (I think you have Lipo)
BATT_ARM_VOLT,44.30
BATT_CRT_VOLT,42.00
BATT_LOW_VOLT,43.20
MOT_BAT_VOLT_MAX,50.40
MOT_BAT_VOLT_MIN,39.60 For 12 cell Lion
BATT_ARM_VOLT,38.30
BATT_CRT_VOLT,36.00
BATT_LOW_VOLT,37.20
MOT_BAT_VOLT_MAX,49.20
MOT_BAT_VOLT_MIN,33.60
(you have these already)
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
Also set this to be a bit more conservative and get better life from your batteries
BATT_LOW_TIMER,5
You can see in this graph the battery voltage really starts to fall more steeply after about 39 volts, so that’s starting to be in the “this battery is for testing only from now onwards” category
If for some reason you can’t arm because of low voltage, or failsafe is activating earlier than expected DO NOT change any of these settings - change your battery or check your voltage calibration.
Thank you for your analysis and suggestion.
During this flight, we did encounter the problem of low-voltage return, but the throttle value and RCOUT output did not match. When the throttle needs the most, there is no change behind RCOUT.
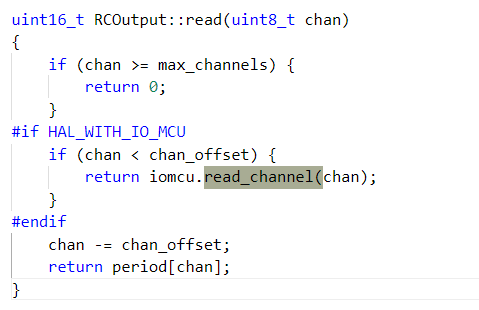
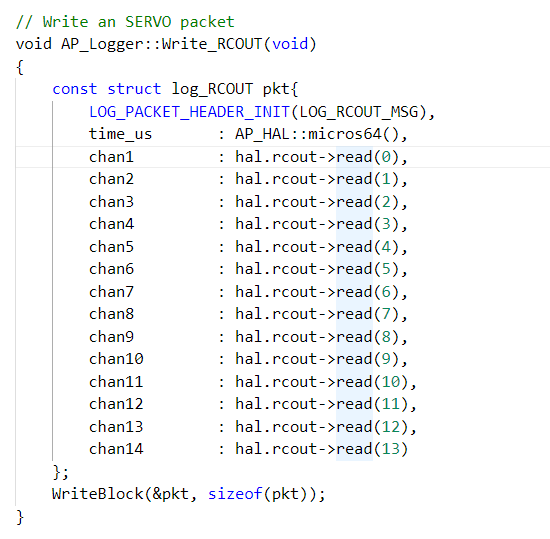
The RCOUT value is calculated by flight controler.
I understand what you are saying but the reason that RCOUT isn’t changing whilst throttle is increasing is that power supply to the flight controller ‘browned out’, that is is dropped catastrophically. Even though this was for a brief moment prior to regaining its value this would have been enough to do something to the flight controller hence why it has flat lined its RCOUT channels. The brown out was almost certainly a result of low flight batteries. There is potential reason to why this happened at approx 10m above the ground. This is generally when the copter’s descent slows to do the final part of landing. To slow down this would have involved an increase in power which will cause a voltage drop. This was probably enough to cause the brown out of the flight controller’s 5v power supply. Remember that although the logs say it was 15ish m height at the time it failed, given the length of flight and accuracies of a Baro this is approx. As the descent to that point had been at a consistent speed I suspect that this is where the slow down for the final landing part was started
There is definitely something going on with the outputs as you show in your original graphs.
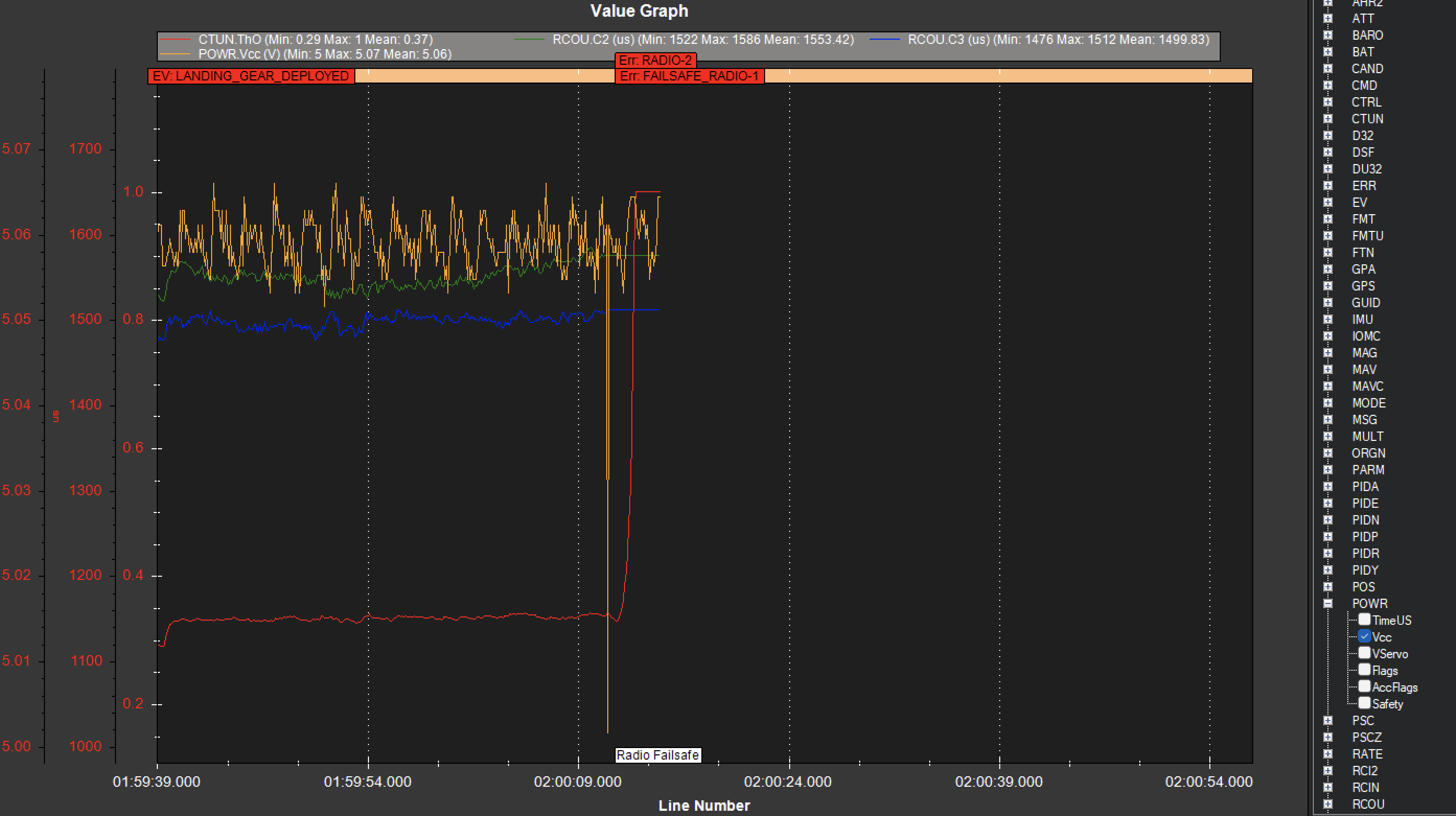
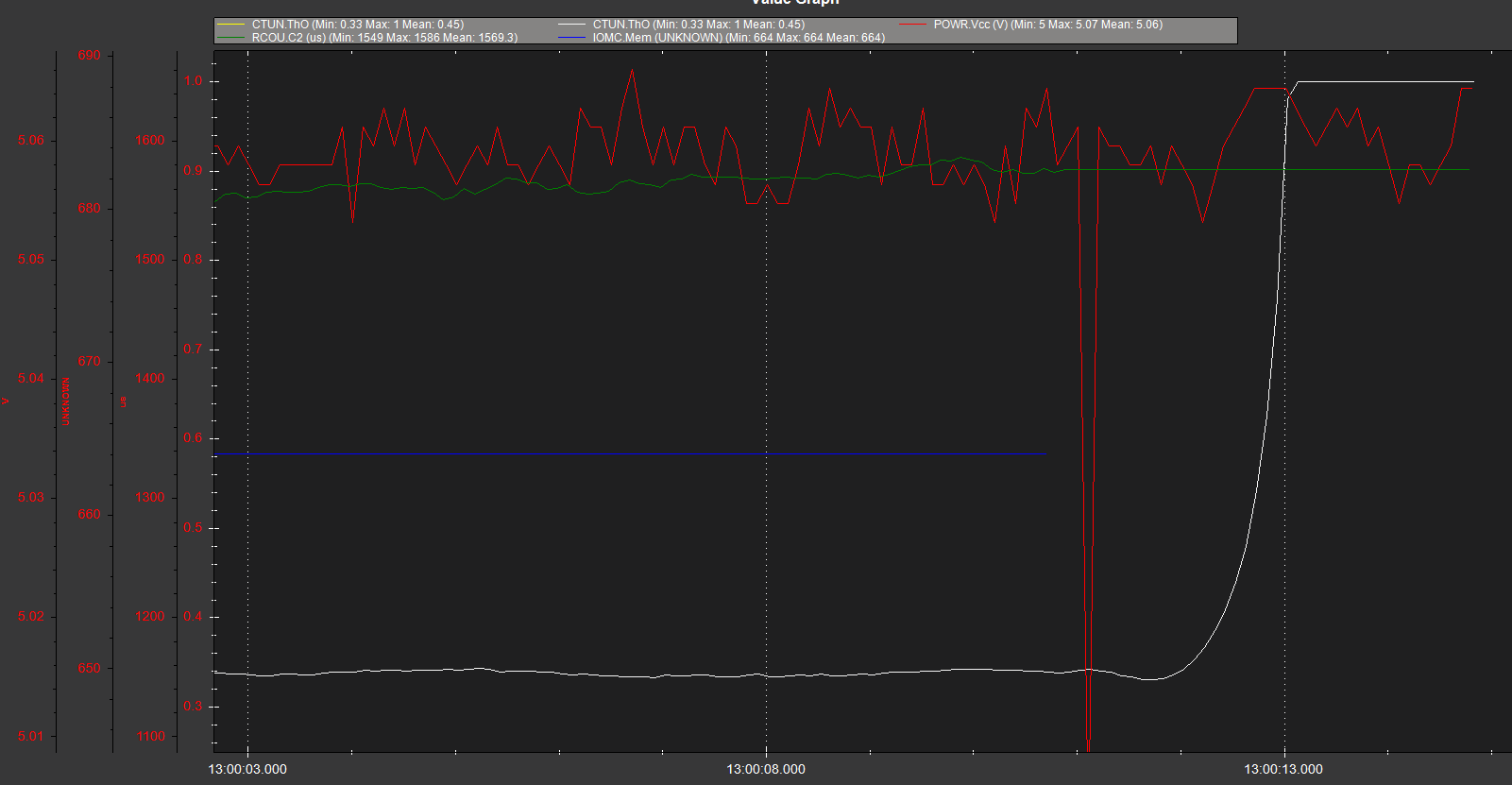
There seems to be a problem with the IO MCU - if you graph any of its IOMC values they all end at the same time the RC outputs freeze and throttle ramps up.
I dont see an actual problem with the Vcc (5 volts DC), except there’s a suspicious dip right at the time the IOMCU stops responding, as if there is a component failure. So I cant say for sure if it’s a software or hardware issue, but it’s looking like hardware to me. I wouldn’t be trusting that flight controller.
I don’t do building of firmware myself, but this still looks suspicious when you said it’s 4.2 DEV
Copter4.1.0-ZL_D3 (2c3bfd4a)
RTOS: 21a93bef
I’d expect to see more something like:
ArduCopter V4.1.1 (01d1aa1e)
ChibiOS: 08877972
Please also always implement my battery recommendations from a previous post, don’t ignore that just because it might not be the root cause of this failure.