Hi, just finished a build using Matek H743 and a BLHeli (v16.7) 4 in 1 ESC.
After arming in stabilize mode the motors do not spin when armed despite MOT_SPIN_ARM being set to 0.1
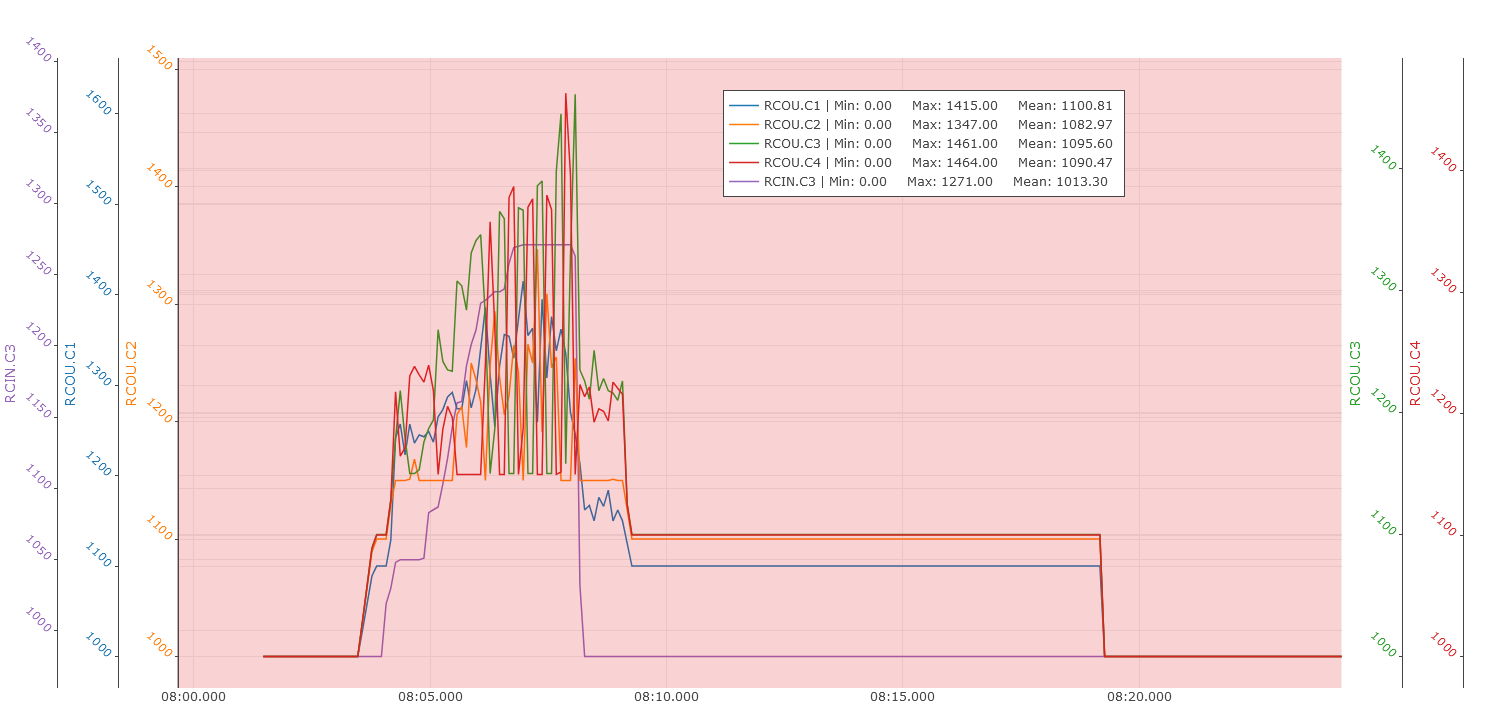
Upon lifting the throttle the motors spin but vibrate and you can see in the RCout on some of the motors are dropping down to flat line and up again.
I’m not familiar with setup on a BLHeli so no doubt my setup is the issue. The normal all-in-one throttle calibration doesn’t work but I can connect with the BLHeli Suite 16.7.14.9.0.2 and set Min and Max PWM to match the ardupilot servo output max and min. Is that correct?
Now I connect power and the bloody thing is beeping mental and pulsing/spinning motors. Not a fan of BLHeli at this point…
No. You can generally leave most, if not all, settings at default and no calibration is required (for BLHeli_32 Dshot). You can reverse the motor directions and if you are using low kV motors disable “Low RPM Power Protect”. Other than that default works for most cases.
The test your are performing will tell you nothing useful. What 4in1 do you have?
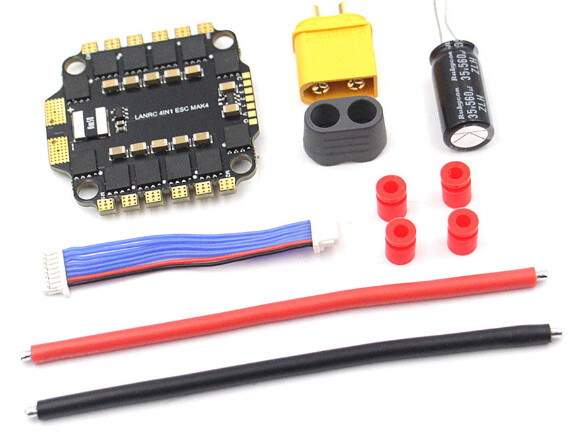
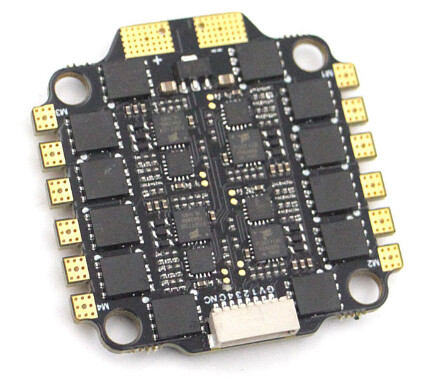
This is the 4in1 ESC (LANRC MAK4) running version 16.7. I wonder if I can upgrade firmware to version 32?.. prob not as I assume it is not 32 bit.
Motors are the RS2205 2300kV running on 4s - so not low kV.
Does the issue lie in the BLHeli pass through settings in arducopter? Settings I’m using is:
MOT_PWM_TYPE = 2 (I’ve tried 4 also) - should I use 0 ‘normal’?
SERVO_BLH_AUTO = 1
The motor numbering/layout on BLHeli doesn’t match the arducopter layout so I had switched servo cables 2&4 on the connection between the FC and the ESC. Perhaps this was affecting how Dshot communication works… I’ve swapped the cables back in the correct order now and that’s when the POS ESC starting beeping like it was possessed.
So that did the trick. I did not have this parameter set " `SERVO_DSHOT_ESC = 2". Thanks for your help! @andyp1per
I also set MOT_PWM_TYPE = 6
Frame_Type 12 didn’t result in the correct motor config, so i went back to just ‘X’ type and swapped servo functions 2 and 4. Servo 2 = Motor 4 and Servo 4 = Motor 2.