Use the MissionPlanner motor test to check what percentage those motors and props need to reliably start up. If for example it’s 10, then set MOT_SPIN_ARM to 0.10
Get MOT_SPIN_ARM as low as possible but still reliable. As Dave mentioned this doesn’t change any flight characteristics or affect thrust.
Then set MOT_SPIN_MIN to MOT_SPIN_ARM + 0.03 , for example MOT_SPIN_MIN,0.13
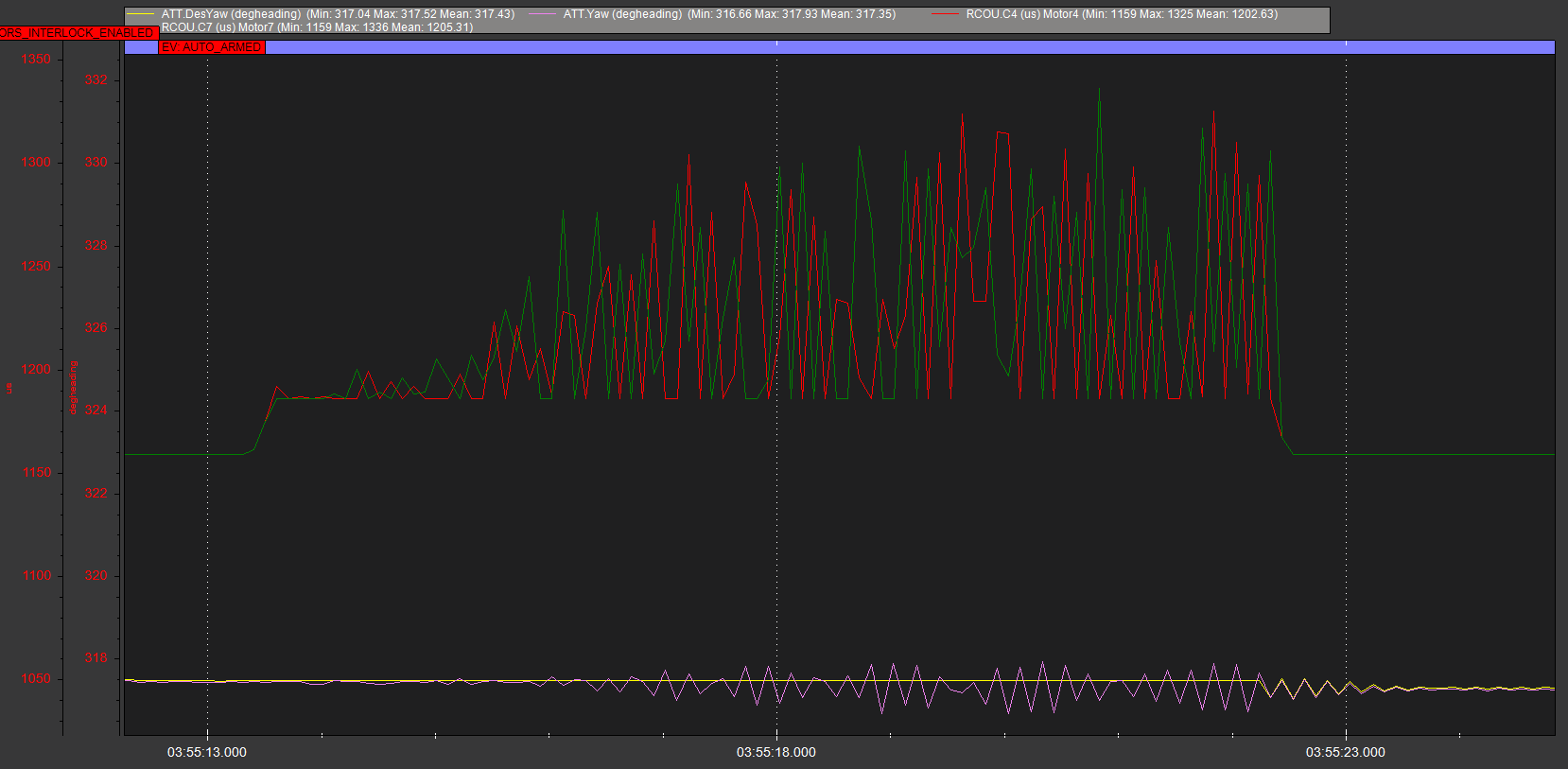
You can see the yaw oscillations clearly in this new log
I included a couple of motor outputs there to show the full effect
Next try these even lower
ATC_RAT_YAW_P,0.6
ATC_RAT_YAW_I,0.06
Does it look like the yaw oscillations get worse or better?
Next step is to increase this
ATC_RAT_YAW_D,0.005
If everything is getting worse instead of better, you could increase these
ATC_RAT_YAW_P,2.0
ATC_RAT_YAW_I,0.2
The FFT is a bit of a mess at the moment due to yaw oscillations, but I think you can safely put these in place, and we might have to adjust them a little after the next test flights.
INS_HNTCH_ENABLE,1 ← set this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.30
INS_HNTCH_FREQ,50
INS_HNTCH_BW, 25
INS_HNTCH_ATT,40
INS_LOG_BAT_OPT,2
Definitely set the HNOTCH parameters before the next test flight.
These might improve pitch and roll a bit before running the next Autotune. These should be safe values.
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.00625
ATC_RAT_PIT_P,0.1
ATC_RAT_PIT_I,0.1
ATC_RAT_PIT_D,0.00625