so i’m building a simple H frame VTOL plane. To reduce drag the cross members are embedded in the wing along the span direction. I think this is the default design choice. In the documentation for copters, the direction of flight of the H frame example is 90 degrees to the side relative to my setup. I don’t know if I should set it up in the same way, except i know that the direction of flight is sideways?? I’ve flown a copter prototype of a rigid H frame but with the motors rotating as an X frame, and it flew fine. However, this VTOL design has flimsy cross members due to the space limit inside the wing, and it has some degrees of freedom in terms of torsion. I am afraid that if I set it up as a X frame when it’s not, the thing is going to crash as soon as there is any wind. Any advice how to set up motor mapping and direction relative to the copter H frame ?
There really isn’t any performance difference between x-frame and h-frame. These are imaginary lines. I have used both on the same model without seeing any change in yaw performance. So use x-frame if it keeps your mind clear for motor direction, front and back.
Cheers!
hey thanks, but I am worried that the frame type parameter could affect how the flight control responds to different ways the frame deforms, hence more of a stability/controllability issue rather than performance? I may be imagining things here but if the control law anticipates the frame to deform in a certain way consistent with a X frame, and the frame actually deforms as a H frame, the controller may put in the wrong correction and cause a crash. Is this not true?
By deform i mean departure from an ideal rigid H frame. I’ve spent a few hours to align the frame under 0g conditions (jig condition) but in flight the frame may deform more than one, two degrees, especially in the torsional sense.
Ron,
I’m not exactly sure what you mean by “frame deforms”. If this is a VTOL design, then it should normally be flying forward and only use copter modes for take-offs and landings. Whether, it is an x-frame or and h-frame, the hovering performance will degrade if the frame is not strong enough to hold the pattern. Typically, this is seen when the booms are mounted on the wings and allowed to see-saw up and down as the wing twists.
i mean structural deformation from the jig shape. so yes the most problematic axis is the along the wing axis where the cross members of the H frame is located. I thought, maybe incorrectly, that the flight controller needs to know what your frame type is so that it can anticipate and apply corrections accordingly.
Ahh, I see now. The frame-type, x or h, changes the internal mixer for compensating yaw and balance. The motor rotation direction is the only difference to the user. There was some speculation that the frame type could affect the yaw compensation but I haven’t seen any proof of that. Perhaps it requires a longer “H” frame to see a difference.
but the copter documentation’s H frame is 90 degree rotated from what is commonly used on VTOL, where to minimize drag the cross members are along the wing axis. i’m not sure what the 5,6,7,8 motor mapping still applies to my case and if any change needs to be made. i don’t wanna test and find out the hard way, that is.
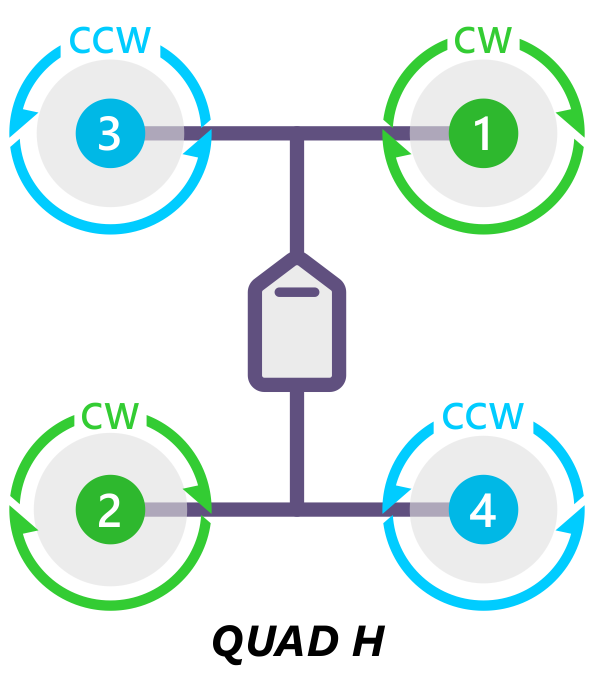
When using an H-frame setup, you need to adhere to the diagram shown here, where the middle of the diagram shows the plane pointing forward. For motors 1-4 in the diagram, add 4 to each to get the servo mapping of 5-8 on the flight controller.
{kind=link}
how did those people cope with a more conventional frame layout such as the examples in Qplane doc, like here: https://ardupilot.org/plane/docs/quadplane-support.html?
I can’t believe the only one supported is the copter H frame you referred to?
If the motor arms are fixed to the fuselage, use a H frame setup, if they are fixed to the wings, use a X frame setup. The two different setups are there, so the frame flex (and there is always some flex) supports the yaw control, instead of working against it. My Mini Talon quadplane (motor arms attached to the fuselage) had absolutly no yaw control when setup as X. I then changed the setup to H and everything was fine.
dude you are right. i haven’t tested it yet but the documentation is highly misleading. it says to use H frame mixing regardless of physical setup. I looked at my H frame set up and the effect on yaw authority and agrees that the H mixing will cause flexing to cancel out yaw command. donno how large the effect is, but the documentation appears to be wrong. i’ll do some testing in due time to see what happens. thanks
Hi. I’m new to this forum. I also tried MiniTalonQuad with two different setups: arm attached on wing, and on fuselage, with X and H motor setups for each. I also found that yaw controld is easier when arm on wing with X setup, and arm on fuselage with H setup. This is because the twist of the center beam caused by the thrust difference gives positive feedback to the yaw control. If the frame is rigid enough either setup works fine, and if the central beam is very weak, yaw should even go opposite, although I have not experienced it.
What makes confusion is the name “H” setup. Arm on wing has H-shaped frame (if you see the plane from the tail) and yaw control works better with X motor setup, whereas arm on fuselage has I-shape (Roman font), and it works better with H motor setup. The copter diagram of H motor setup is of course correct, but it has (Roman) I-shaped frame. I wish it was named “I” setup.
Sorry if I have made further confusion.
Hi Hiroshi,
Thanks for posting and welcome to the APM VTOL forums!
I agree that frame rigidity plays a part in the performance of the frame type. This, along with the Q_A_RAT_YAW_P setting is why we have different reports on performance.
From the Yaw Tuning section of the WiKi:
Similar to roll and pitch, if either Q_A_RAT_YAW_P or Q_A_ANG_YAW_P is too high the QuadPlane’s heading will oscillate. If they are too low, the QuadPlane may be unable to maintain it’s heading.
Cheers!
Hi, Greg. Thanks to the well-tuned default PID parameters by the developpers, I normally fly planes/quadplanes without changing them except for by autotune. Now I understand yaw response can also be controled by the P parameters. I think the best way to get stable yaw control is to make the frame rigid. Making the frame more rigid without increasing weight is not always easy. In my case of MiniTalonQuad with (Roman) I frame (i.e., arms on fuselage), I tried severay ways to mount the arms and also to minimize the cut of fuselage. Before I made a large cut for battery access from the bottom which reduced the torsional strength of the fuselage. Another way is to reduce the tosional force by making the arms shorter by using smaller props for FPV racing drone. Before I was using 10 inch props with low KV motors, but when I changed it to smaller props with high KV FPV racing motors on shorter arms, the yaw control is rock solid. It also reduced weight and air drag. I actually learnd the idea to use FPV drone parts by reading through your MiniTalon quad conversion forum and Mozzie docment. I should have read them much earlier in order not to waste my time. Thanks a lot.
Had my first flight in Qstabilize and Qloiter, wind was strong, but the drone flew alright. Glad I had it in X mixing. i’ve used dual 12mm CF tubes along the span but these are very flexible. I can’t use any larger diameter tubes because my wing would be cut up bad to fit in larger tubes. Against the stiff wind the tubes really go up and down a bit…as were my blood pressure…but they held…will fly again when wind is calm.