I’ve installed a MATEK F405-STD/Racestar 4in1 in an X-quad using betaflight frame type 12, also corrected for the board oriented 90 degrees right. I re-calibrated the AHRS and the HUD shows correct orientation. Messages confirm betaflight frame type is installed (‘Frame: Quad/BF_X’).
Appreciate any suggestions. Just two motors to go : (
Looks like that Racerstar doesn’t have a typical Betaflight X order like most 4in1’s do. I have some like that. Just re-arrange them until they are right.
I think you should troubleshoot this and not settle for it not working. It’s a BLHeli_32 ESC right? Post your parameter file if you want to work at it. Or get out the soldering iron.
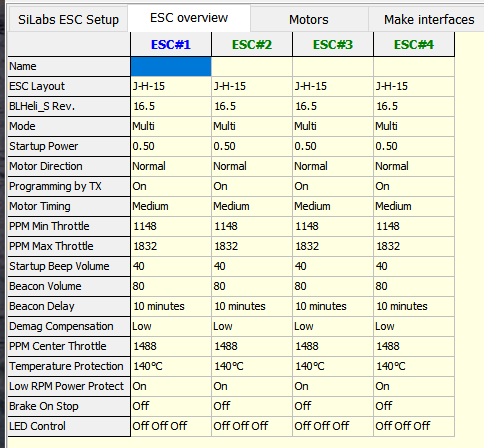
I hear you Dave. Racestar specifies ‘BLHELI_S J_H_xx firmware’. What is a parameter file and how to retrieve it? I tried two different cables and two different PCs.
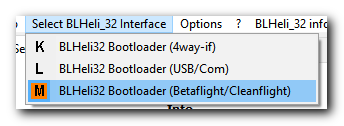
Thank you @andyp1per and @dkemxr. I hadn’t set SERVO_BLH_AUTO=1. MOT_PWM_TYPE is set for DShot600. I also tried another BLHeli tool. I am uncertain how to post the parameter file, but perhaps this provides that information?
I find the sliders do not actuate the motors. How to correct that?
We were talking about BLHeli Suite so I thought the parameter file was from that. MP041522.param (18.0 KB)
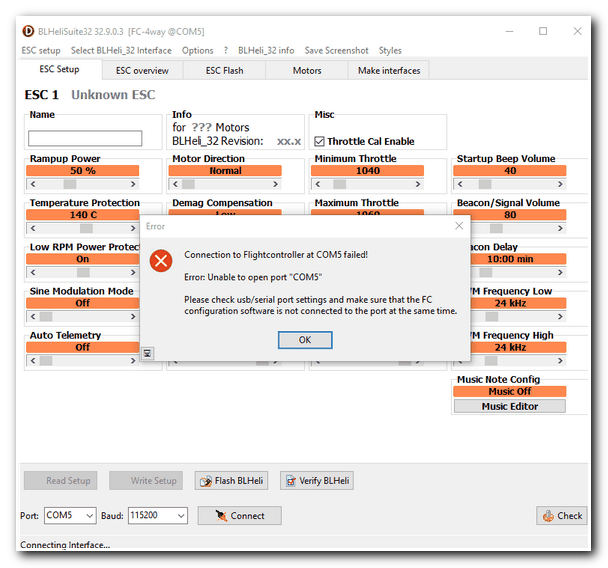
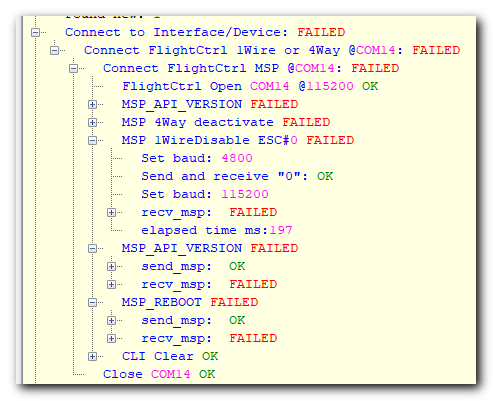
I tried to reverse two motors while connected with passthrough, then went back to MP, switched passthrough to off, then tested the motors. They did not show a reversal, so I again switched passthrough to on, returned to BLHS, but this time encountered the connection error. I thought I was making progress, perhaps I am not following a proper workflow.
Not sure what you mean by this (off/on). In BLHelisuite, reverse the motors that require it and write the setup. Confirm in Overview that it’s done. Then disconnect and power cycle the craft. ESC’s require a restart with any change. Then connect to Mission Planner and us Motor Test. You can only connect to one application at a time and there is nothing to turn on or off.