i am currently trying some experimental setups for a wall suction drone where i will need just a singular proppeller to spin at various speeds, but somehow the prop only starts spinning at 50% throttle and gives me 50% power from that point.
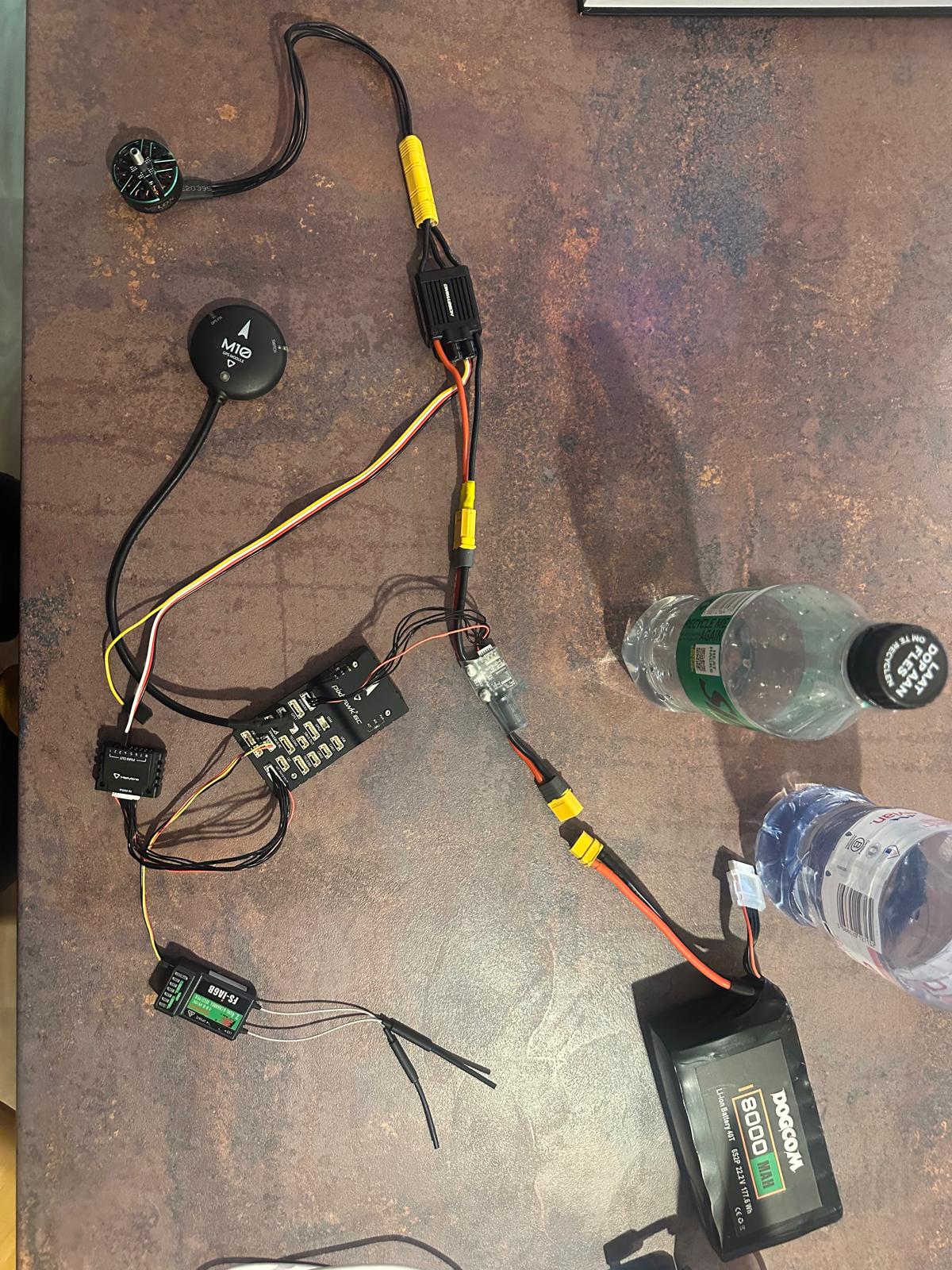
i a using a flysky i6s TX and Flysky ia6B RX to control my Hobbywing 6A ESC and T-motor velox 1950KV either directly from the RX or thru the pixhawk with gps module.
i dont need any failsafes for now i am just trying to test the capabities of my desgin my modulation the thrust.
if you cannot find a motor diagram to suit your design, I do not think you can use Arducopter firmware. these are selected from the frame class and type.