my pixhawk is connected to nucleo moab board and the moab board in-turn is connected to the motor of the wheels. i am using futaba T10J as my RC and when receiver is connected directly to the moab the motor rotates but when the receiver is connected to RCIN port of the pixhawk motor doesn`t spin nor shows any signs of rotation nor the mode changes. i have connected from sbus port of pixhawk to the sbus port of the moab board. how do i fix this?
I don’t know anything about a Nucleo Moad board but is BRD_SBUS_OUT enabled?
thanks for the reply.
yes its enabled and set to 50hz.
I have not used Sbus Servos but when you do the device ID has to be mapped to the right servo output channel based on Servo ID. Servo ID 1 to SERVO1_FUNTION, etc. How is the Nucleo board identifying/setting each channel ID?
sorry, it is not sbus servos, its brushless dc motor.
how do i make a connection between pixhawk and a brushless dc motor
With an ESC of course. I assumed the Nucleo Moab board, whatever that is, was serving that function. Didn’t you get this answer in another thread?
i am bit confused here if moab can directly be programmed to connect the pixhawk or is ESCs a mandatory?
Provide some detailed information of this “moab board”.
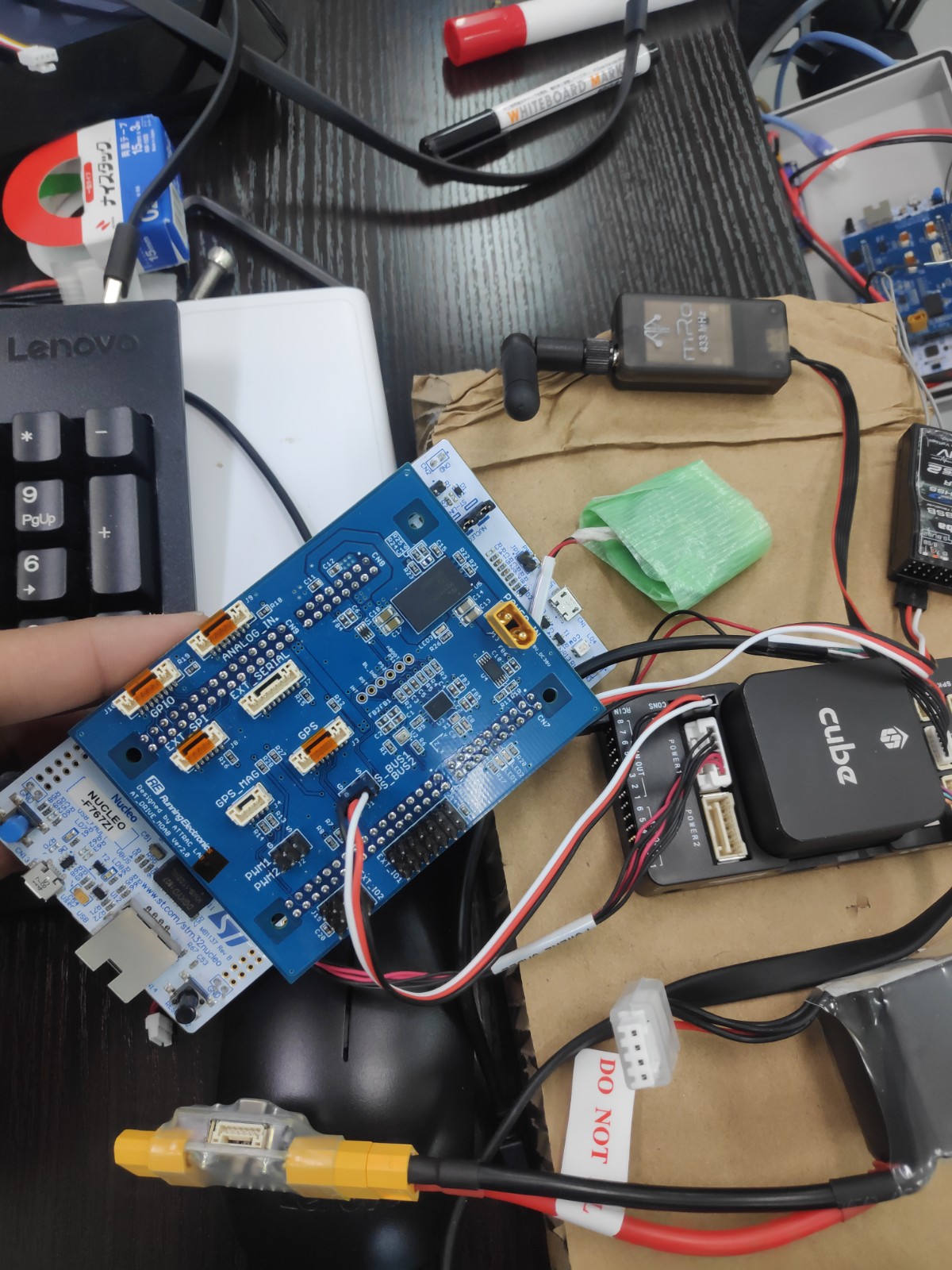
it is like this, i have connected jetson nano to this board. motor control programs are written inside this board. there is a sbus port, pwm port in it. i tried sbus to sbus connection from pixhawk but did not work.
information about the board
You didn’t say that the Moab board is a motor controller. But in any case I don’t understand what you are trying to do with a Pixhawk Cube, A Nucleo Board, a Motor Controller board and a Jetson nano.
For the Moab board perhaps you should be talking to this guy
okay, i will ping him.
thanks much, Cheers!