I am uploading the log file, and the issue I am facing right now is the motor heating issue. Physically, the motor is balanced and I got 21 min of flight time.
Please check the log, I am not getting what would be the issue with the system.
The Drone specifications are given below;
Pixhawk Cube orange + Here 3 GPS
Herelink
Tarot 620kV 4006 motor
Hobbywing X-rotor ESC 40A
Carbon Fiber Straight Propeller 1355
Tattu 16000mAh LiPo battery
Tarot 650 IRON MAN 650 Foldable Quad-copter Frame TL65B01
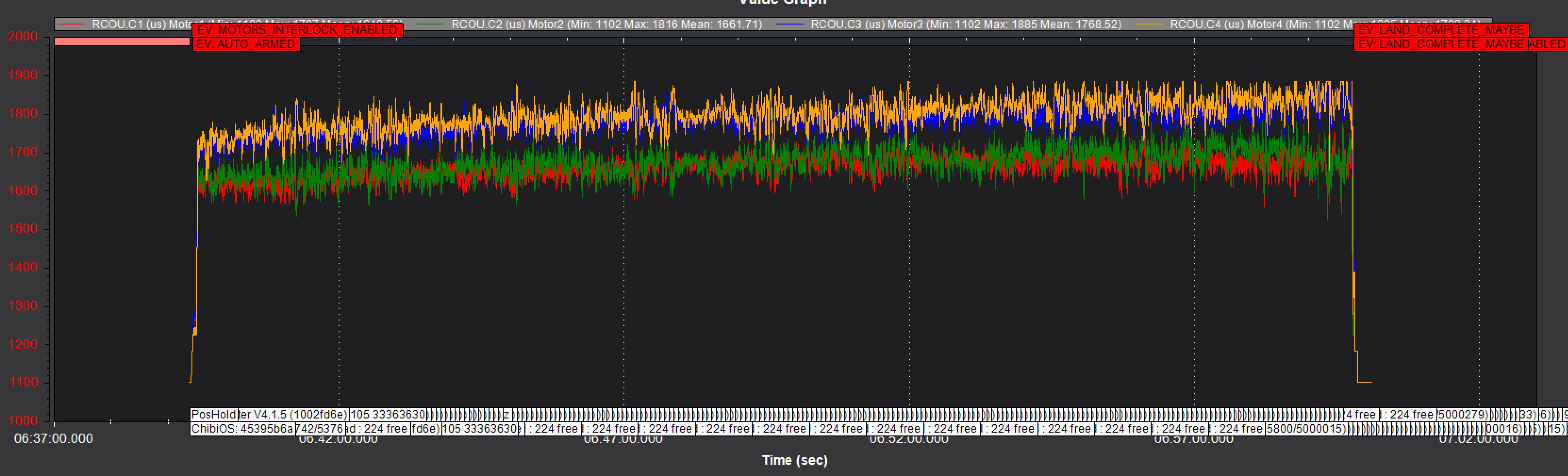
Overweight/underpowered. Predicted hover throttle is ~70% (should be 50%) which is about what’s seen here. You also have a mechanical yaw bias making things worse. I suspect under higher power demand you will see thrust loss errors:
Current logging would be useful here, you don’t have it.
Tuning is poor but that’s to be expected as you haven’t set the Initial Tuning parameters and done any (all at default). There is a screen for that in Mission Planner under Mandatory Hardware.