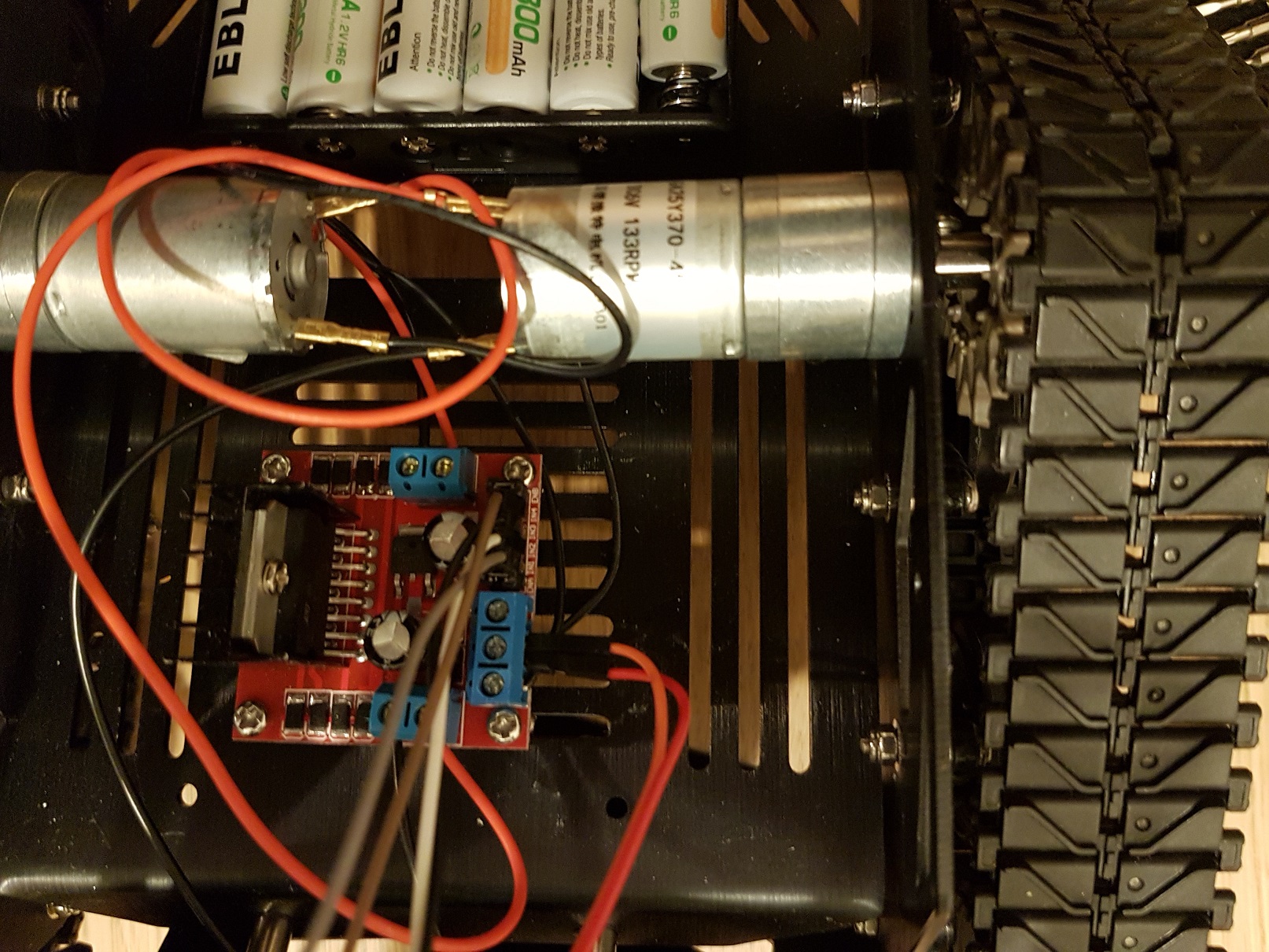
Ok that is all correct. I have the jumper on. I am not using the5 volts output at all. I am powering the motors direcly from 8 AA battery connected through the two blue power sockets. I will try to take a better image and post.
Thank you

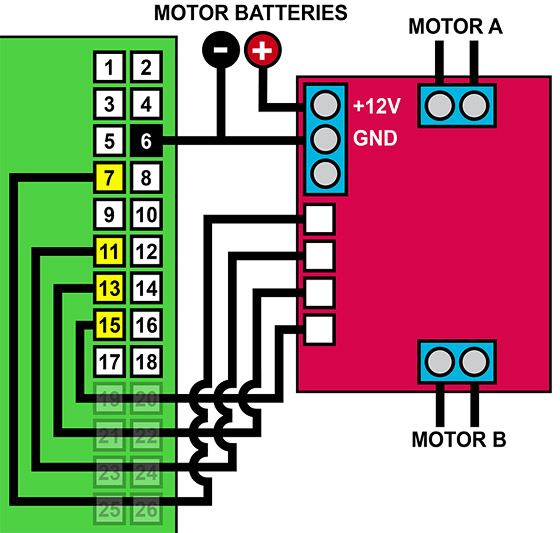
Ok the connections I set up were similar to the raspberry pi I had earlier. The schematic is below. pins 7,11, 13 and 15 on pi are the ones I connected to the pixhawk and pin 6 on pi is an earth
You may want to read over the Rover Docs. It looks like there are 6 wires where a max of only 4 are needed. Best I can tell.
This controller will need you to set the motor output to “brushed with relay” or”brushed bipolar”. I don’t know the specifics of your hardware so it could be either. http://ardupilot.org/rover/docs/common-brushed-motors.html
This is all Ok.
If you use two set of battery packs, I would share the ground between them.
I can’t tell you any more.
Thank you for all the help and advice. But my original request remains. I am not sure how to reach the right person I.e the person who documented skid steering on a rover. The diagram provided in docs does not clearly indicate the pinouts for the motor controller to the pixhawk. Firstly it show three when there are in fact only two, and second it is not clear which goes where.
David, The docs show 6 wires but you are right there are only 4. so I assumed the other two were ground and maybe that was a mistake. Looking at the rover from the pin side with top as top I connected the ground to the top set of pins on 1 and 3 and then connected 7,11 to the next two down on 1 and 13,15 to the next two on 3. I think I will remove the ground for now and see if that helps. Is it possible that connecting the top pins on 1 and 3 to ground may have caused the power problem that burned out the pixhawk? Something caused the APM power module to draw excess power through the pixhawk.
Tony
01573-410522 The Shieling, Nether Huntlywood, Earlston, TD4 6BB Scotland http://www.ooftsauce.com Facebook: https://www.facebook.com/pages/Ooft-Hot-Sauce/1380575552196814
@khancyr can you chip in here?
The key confusion seems to be pwm (3 wire plug) vs relay (2 wire plug) motor control setup, and I’ve provided the wiki link to that.
I can’t read the brushed motor controller where the wires go in. I don’t think this should be set up as a relay output. Doesn’t this motor controller take a PWM signal and translate it to voltage for the brushed motors
I read a data sheet on this thing.
This isn’t a “normal” esc. It’s just a H-bridge, so basically there’s 2 pins for each motor controlling direction (ie high-low for forward, low-high for reverse, or similar).
There’s a pwm for speed as well, but it isn’t normal range (0-255 not 1000-2000).
It should work as brushed-with-relay.
This youtube video tells it all.
Hi James the video explains a normal set up and there are in fact 3 pins (my mistake as using th pi I was only controlling direction not speed. I am trying to establish which pins go from this to which pins on 1 and 3 of the pixhawk? After that there are set ups to do as you say in mission planner
Ok based on all your feedback and my failure to spot I did not control speed on Rasp pi 0 I now see that there are in fact three connectors from the n298 bridge that need to go to the pixhawk. One cable is for speed that is the end pin on the bridge. The other two are direction. SO now coming back to the pixhawk, how to connect this?
http://ardupilot.org/rover/docs/common-brushed-motors.html
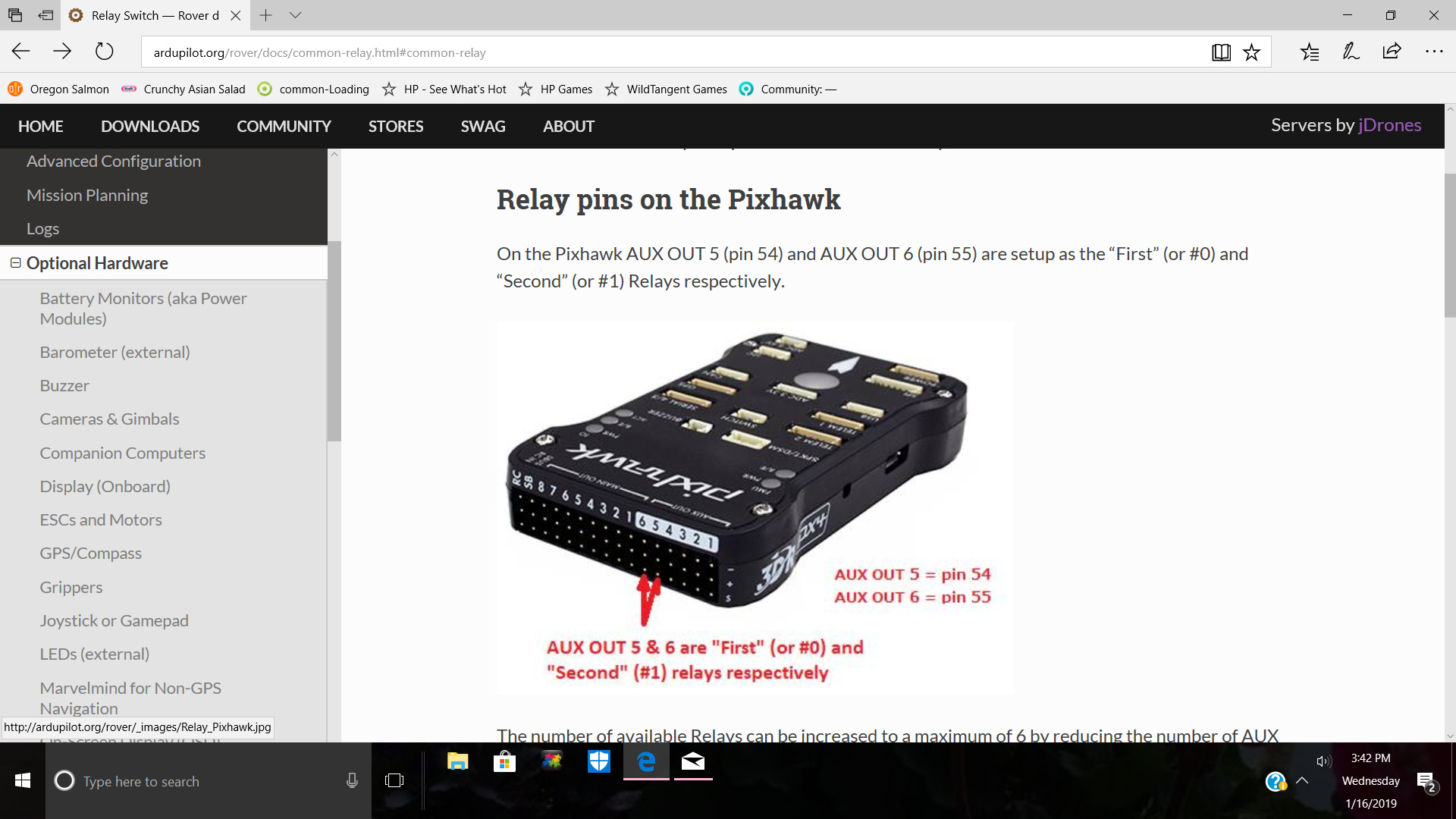
Looks like Aux 5 and 6 are for the relay pins.
By default, yes, 5 & 6. You’ll need to assign 2 more pins to relay (two for each motor), plus the speed pins.
All 6 of those are connected to the signal row on the Pixhawk. You’ll need to add a ground wire too.
I don’t think they all go to the middle row. This may have been the problem. Signal is the bottom row I believe. I’ll take a look at one of my Pixhawks,
Crap. I shouldn’t answer this on the bus.
My bad. All 6 are signals. Bottom row.
Hi thanks but confused (of course) as the inline docs for Rover and Skid Steering say that they should go 3 and 3 to pins 1 and pins 3. Now we have established that it is three its just getting the right ones in the right pins? I guess the critical one is the speed pin as the other 2 if you get it wrong will just need reversing (if say the rover goes backwards instead of forwards).
If SERVO1_FUNCTION is 73 and SERVO3 is 74 then the speed pins would go to the signal pin on output 1 and 3. Looks like you can also assign more of the aux outputs with the RELAY_PINx parameter. I’ve never set up a brushed system so this is all marginal advice at best.