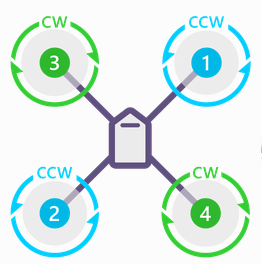
What is the motor numbering layout for connection of ESCs to the motor output using a Micro APM_2.7.2? Firmware: AC 3.2.1 / AP 3.4.0
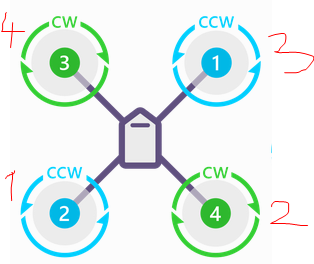
The numbering I’ve used is as follows:
The copter wants to flip etc and the FC has arrow pointing forward and the case isn’t upside down… Its difficult to know which motor is pulling the extra force/speed. But if i was to guess I’d reconfigure it like this (which doesn’t look right)