Latest is 3.7-dev. Be warned: it’s not a stable release. Results may vary.
Thanks, where do I get it?
Does anyone know how to set prearm switch? (not hardware safety switch, but on the RC)
The FPV pilots are using this kind of safety arming, but they are on Betaflight, not Arducopter.
I know I can use internal logical conditions on my radio controller but in this case that’s not the main goal.
RCx_OPTION 41 is used for switch Arming/Disarming if that’s your question.
Was this feature only available up to Version 4.1 (see attached clip)
If this is correct how can a transmitter switch be assigned to Arming? ![]()
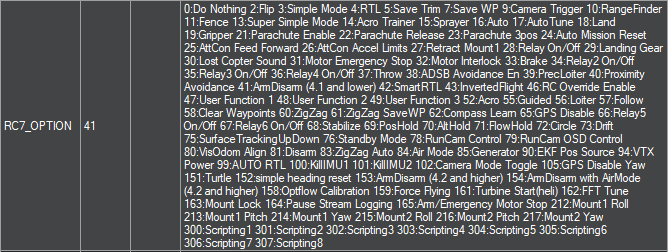
It’s in the list look closely. The strategy >4.1 has changed with more options.
153
Many thanks ![]()
Alan K.
| dkemxr Dave
October 2 |
- | - |
AK7466:
can a transmitter switch be assigned to Arming?
It’s in the list look closely. The strategy >4.1 has changed with more options.
153
Thank you for your reply but I’m interested in another function. I need a switch that needs to be turned on before I can arm the vehicle. In other words, if the prearm switch is OFF the arming is just wont happen. This is a safety option that requires two switch in the same time to begin arming. Is there an option for this on board?
You have the Emergency Stop function and the Motor Interlock Function. If neither of those does what you want use a transmitter switch mix.
So ArduCopter does this a little differently. The motor interlock feature provides the additional layer of safety however for multicopters this feature is disabled by default. many use a hardware safety switch that must be pushed before you can arm the aircraft. The motor interlock feature is a software safety feature that restricts the motors from energizing until it is enabled but this has to be done after the aircraft is armed. So the sequence is:
-Initially aircraft is disarmed with motor interlock disabled
-Arm the aircraft
-Enable motor interlock
ESCs are then energized and you can start flying.
Bill, that is exactly how my drones startup. The difference between Heli and the drones is as follow. When I enable Motor interlock after arming, the Heli motor spools up only after interlock is enabled, as it should be.
But my drones start idling immediately after arming. Throttle is doing nothing at this stage. After I enable Motor interlock I have full control with the throttle. You can set how fast you want the motors to idle. I can see all motors are working evenly and good for takeoff.
I hope that will explain in detail for @bober2496.
@FRED_GOEDDERT thanks for providing more detail on that. I wasn’t aware that the motors on multi’s would turn at the min spin rpm once armed with motor interlock disabled. Thanks again for the clarification.