Hello, although the “MOT_OVER_LEARN” parameter is set to 2, the MOT_THST_HOVER parameter does not adjust, but remains fixed at the initial value that I set.
What explanation?
Thnaks
You need to hover in ALT_HOLD for a while without moving the throttle stick. I think it’s about 20 or 30 seconds.
What initial value did you set? It won’t learn a value below .125
I have set a value of 0.25
Can it be also calibrated in loiter mode ?
You can do that by manually hovering in any manual throttle mode and then looking at the logs to see at what throttle your drone maintains altitude.
1 Like
Any assisted mode that uses the Alhold Controller (like Loiter).
And as @LupusTheCanine says look at the average value of CTUN>Tho in the log when hovering.
Provide a .bin log and we might be able to see why the hover value is not changing as expected.
Usually it’s because motor outputs are oscillating wildly because of vibrations or similar, and stable hover cannot be achieved. It can even be hard to see sometimes until you look in logs.
Yes, the motor outputs oscillate excessively, but it does not depend on the vibrations being under control. I don’t understand the reason for such swings.
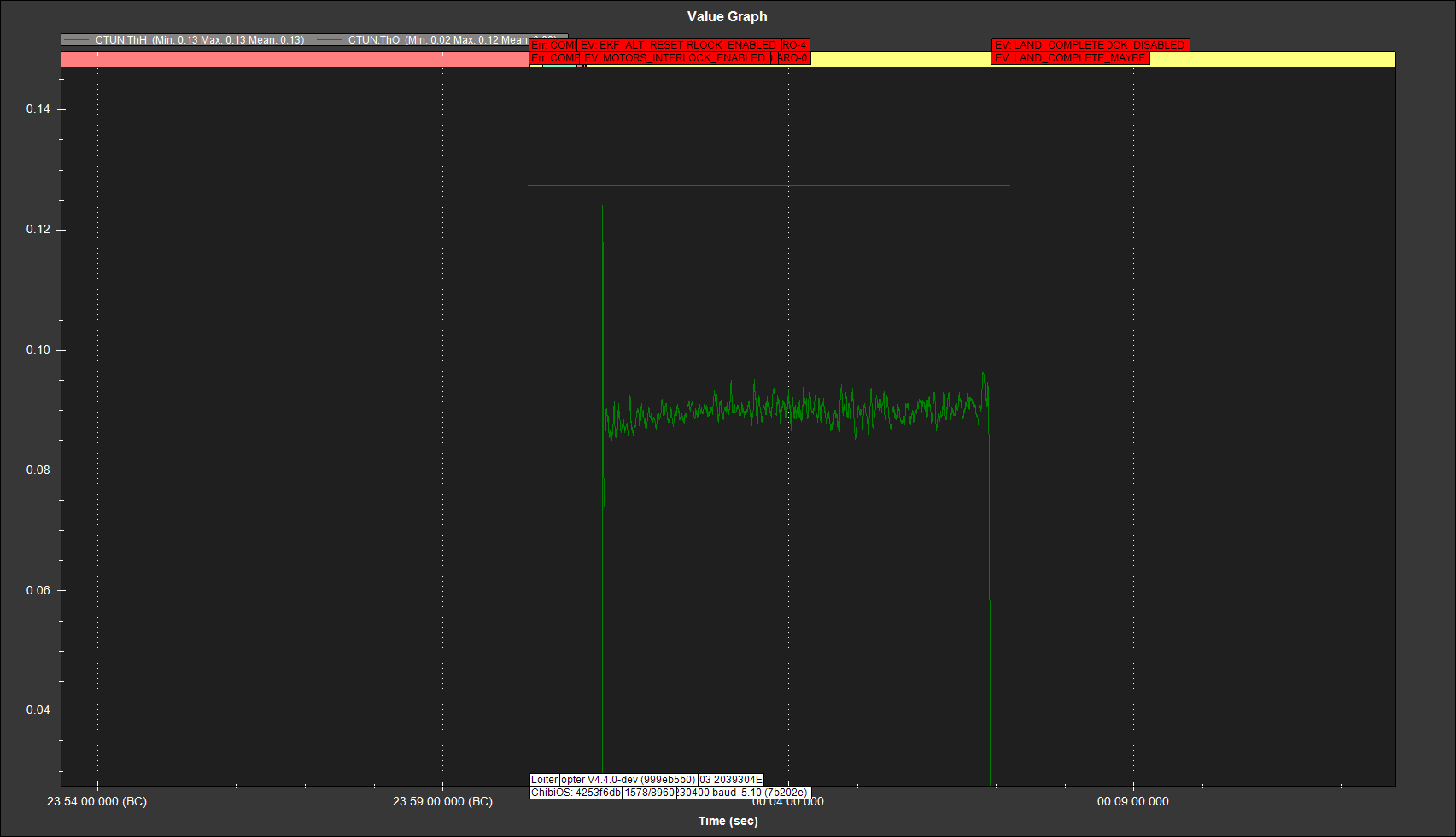
my “MOT_OVER_LEARN” parameter is set to 2, MOT_THST_HOVER fixed to 0.13, Tho around 0.09, am i overpowered ?
thanks
That’s subjective. I don’t think so at all. Disable learn and set MOT_THST_HOVER to .09. Make sure you set the PSC_ACCZ_P/I values too. In the tuning wiki.
1 Like
As long as the copter doesn’t hit min thrust too much it should be fine. Though I would be careful as with any lightly loaded rotor as reverse flow and therefore pass through VRS is likely during descent. Even though the copter surely has enough thrust to punch out of almost any trouble I would avoid vertical descents as much as possible as response may be delayed while the air is beaten into submission ![]()
PS also rotor stall during rapid throttle increase wouldn’t surprise me.
Make sure your thrust expo is set correctly as you will be using all of it ![]()
1 Like
I have several small quads (4-6" range) with thrust/weight higher than this. Yes, some challenges for tuning but nothing to be afraid of. If it were a larger craft I would probably ballast it with a bigger battery! When I have build larger craft in the past the battery would be the last thing I would purchase with weight (hover thrust) being the deciding factor after already having chosen a battery voltage during he planning stage.
Hi, Im having the same problem, can someone help? here is the log