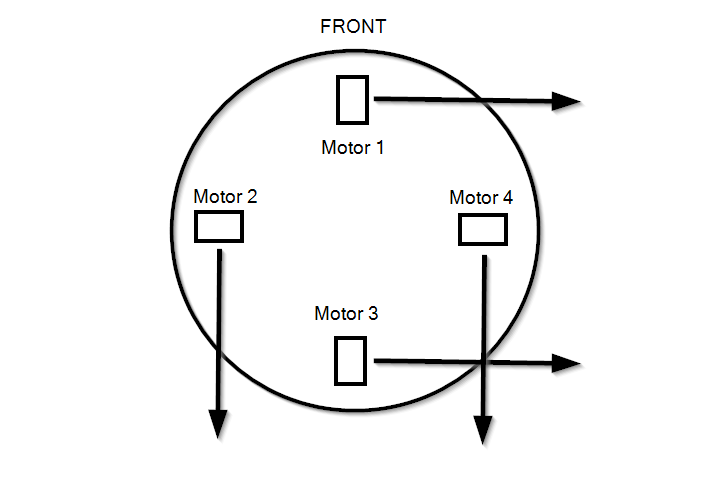
I have managed to configure the flight controller to work in the configuration by using a FRAME_CLASS of 2 and a FRAME_TYPE of 3, which works how i would expect in mission planner.
The issue is simply the slew rates of motors 1 and 3. As they are reversible, I don’t want to blow an ESC by quickly switching from left to right (vice versa) on the radio, I would like the motors to gradually transition to the appropriate speed. I have tried setting the MOT_SLEWRATE parameter, which works however only for motors 2 and 4 (forward and backward).
This is for manual control only, my understanding is that the ATC_STR_RAT parameters only apply to auto/waypoint steering?
Any ideas/suggestions would be greatly appreciated
change it to PILOT_STEER_TYPE 3 and you wont get the harsh direction changes you get in default mode. the problem in default mode is its trying to change its rotation direction to emulate a rudder when you transition from ahead to astern, changing to mode 3 will make it behave like a multirotor where right yaw is always clockwise.
I recommend blheli_32 escs with current sensors, that way you can just set a current limit and not have to worry about blowing escs or motors.
Thanks very much for the info, I have tried your suggestion however it doesn’t seem to alleviate the issue. Perhaps I need to change the frame type, I will experiment and report back later…
Regarding the ESC’s, they are the BLHeli_S (ones without telemetry, bluerobotics basic ESC), so unsure if they are actually current limited in some form. I have worked with generic ESC’s before and I can confirm, most are not current limited (!!!) hence my concern.
I will probably end up replacing them anyway as i would really like the telemetry, is there any you would recommend?