I am trying to configure the latest Mosaic-Go Dev Kit single head, I have followed all the guide that are presented on github, but the firmware stuck on detecting the Baud Rate, I saw that this problem isnt new and it was discovered years ago, but I think that nobody have fixed it. I have tested also the latest Ardurover firmware but the problem persist.
Also the GPS seems detected, but it give the same message also when it is disconnect. I hope that someone have solve this problem. Thanks in advance
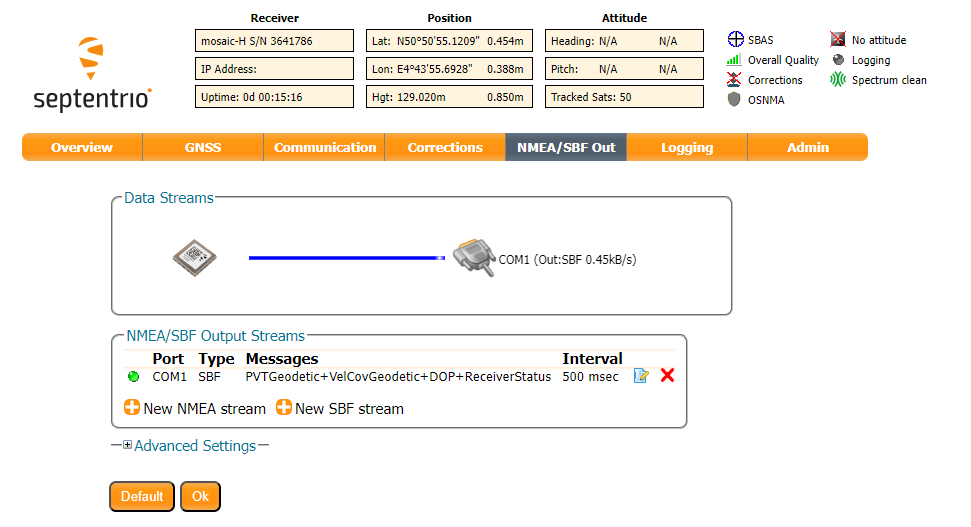
Ok thanks to the Septentrio Support I finally get the Mosaic-Go working with the Arducopter and Ardurover firmware. I upload the mosaic-go config and the full paramter list. MissionPlanner_config.param (16.6 KB)
Hey @xVanish69, can you share a wiring diagram? I’mhaving the same issue but I wasn’t able to solve it with your parameters, mainly because I’m not trying a heading configuration.
Hi xVanish69,
we have a Mosaic-Go single antenna module connected to Serial Port 3 (GPS 1 port) of our “Cube Orange” autopilot.
We tried to upload your parameter to our “Cube Orange” autopilot with Arducopter ( 4.2.2 version) and we noted some strange behaviour that i list below:
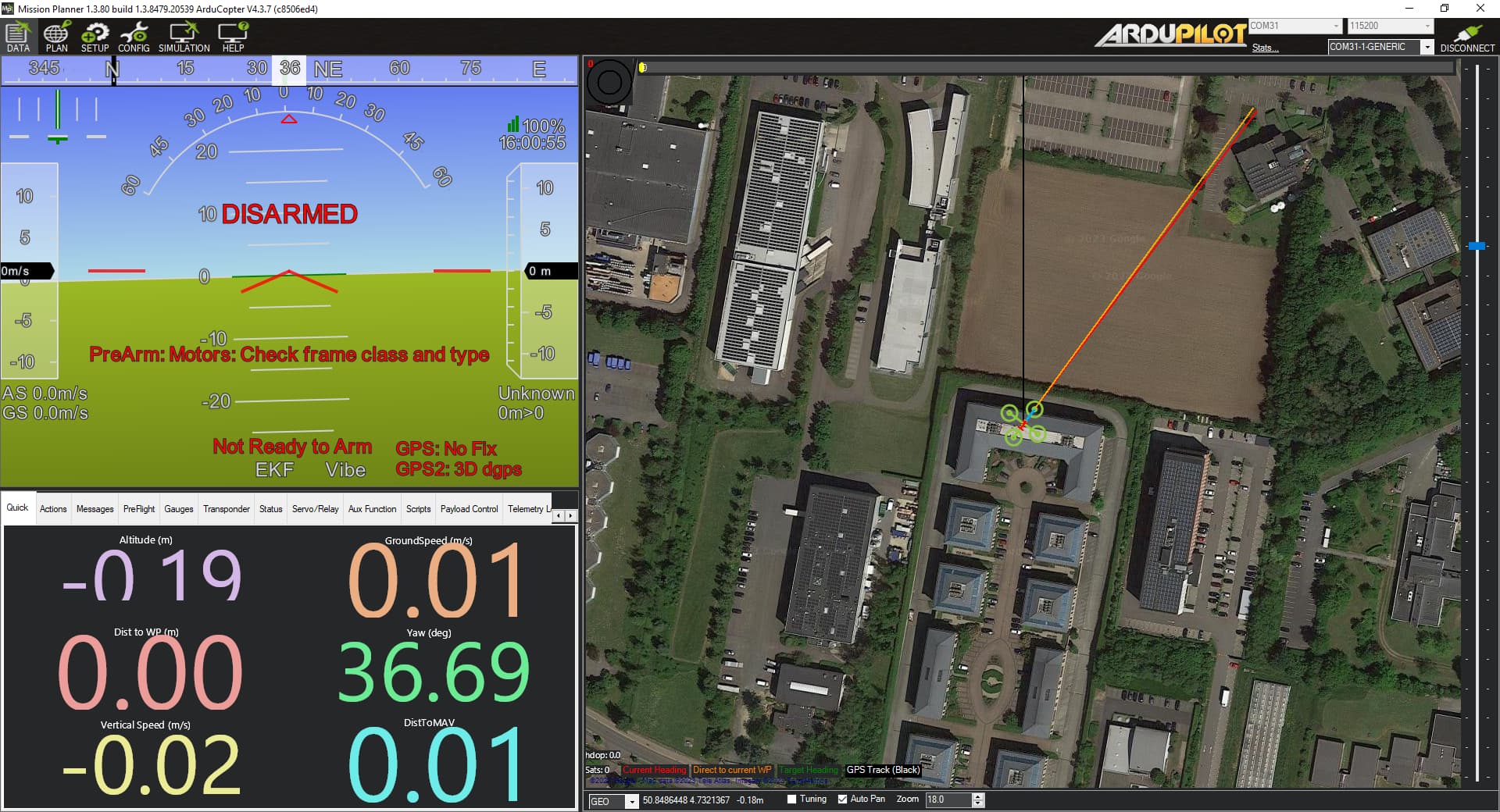
We connected the Mosaic-GO module on GPS1 port but we obtain the “3D-FIX” message on GPS2 and not on GPS (as in the image that you posted). Does it means that both the serial port (GPS1 and GPS2) are busy with the Mosaic-GO module ?
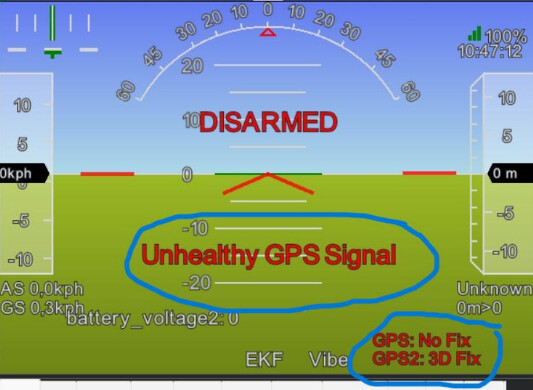
On the HUD we have the following message “Unhealty GPS signal” that we can’t fix.
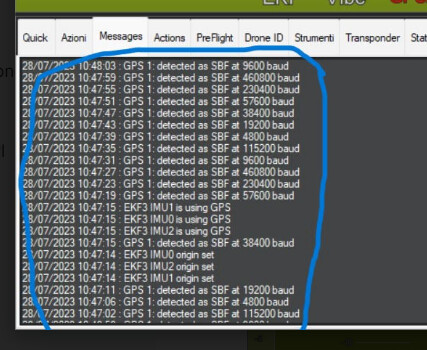
On the “Messages” tab we see a strange infinite loop of messages relate to the baudrate of the GPS1 as you can see in the following image:
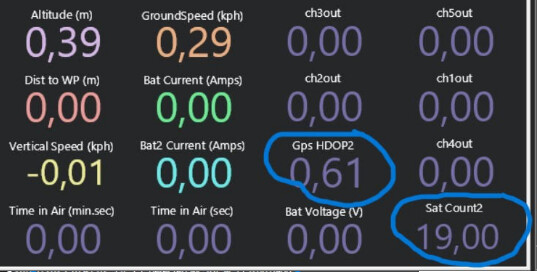
Also if the “GPS-HDOP2” and “Sat count 2” parameter are good, we would like to solve the proble above before try to takeoff.
I am using an Orange Cube with a Mosaic Go (non heading).
I have the mosaic plugged into GPS1 on the Cube.
In the full parameters, I have both GPS1 and GPS2 configured on. If I turn off GPS2, it doesnt work. My Mosaic is plugged into GPS1 but only shows SATS on GPS2.
My issue is pretty much exactly like that forum post above
A constant loop showing this: GPS 1: detected as SBF at xxx baud
The gps is plugged into gps 1 on the cube but only shows satellites on gps 2 (if I turn off gps 2 in the parameters I get a false error and it doesn’t work)
If I try to go into loiter or guided mode or position hold etc it gets a prearm check warning for gps 1.
If you need screenshots, or logs etc just let me know
3/7/2024 8:48:29 AM : GPS 1: detected as SBF at 9600 baud
3/7/2024 8:48:25 AM : GPS 1: detected as SBF at 460800 baud
3/7/2024 8:48:21 AM : GPS 1: detected as SBF at 230400 baud
3/7/2024 8:48:17 AM : GPS 1: detected as SBF at 57600 baud
3/7/2024 8:48:13 AM : GPS 1: detected as SBF at 38400 baud
3/7/2024 8:48:09 AM : GPS 1: detected as SBF at 19200 baud
3/7/2024 8:48:05 AM : GPS 1: detected as SBF at 4800 baud
3/7/2024 8:48:01 AM : GPS 1: detected as SBF at 115200 baud
3/7/2024 8:47:57 AM : GPS 1: detected as SBF at 9600 baud
3/7/2024 8:47:53 AM : GPS 1: detected as SBF at 460800 baud