I’m pretty sure I’m going to update my old JR to a Radiomaster TX16S.
I’m now trying to determine which receiver would be best suited for my Align 450L using ArduCopter with that radio.
Since I’d eventually want to fly at a distance, would it be best to get Radiomaster’s Ranger ELRS module and Nano receivers?
Will these components support functionality for telemetry and control in Mission Planner?
ETA: I just read in the wiki that “ERLS telemetry does not provide bi-directional telemetry like Crossfire”. Is this being developed and might it be incorporated at some point?
Since the Ranger has WIFI, could I connect to a PC wirelessly for Mission Planner?
Although the TX16S doesn’t currently have factory-incorporated Bluetooth, the Ranger module does.
Since that is the case, would it be possible to have wireless head tracking control through the TX16S with the Ranger’s Bluetooth signal?
this is already developed look at airport mode. although you need two separate ELRS setups and preferably one on 2.4 and the other on a different freq.
I have been happy with crossfire for distance and allowing mavlink comms. but you may want to look into something like RFD or mLRS. mLRS is not as developed as elrs but it supports mavlink and rc comms but it a very diy solution right now.
If I don’t use Crossfire or ELRS, what would be the best choice of receiver for the TX16S, and which telemetry radio system would be best for Mission Planner?
Personally, I think those are your best choices. You can get into RFD TXMOD systems and Herelink, but that’s getting into some big cash and may be more than you want/need.
Crossfire and ELRS both have their issues. I use Crossfire. It’s a great link. I can get full Yaapu telemetry back to my TX16S. I’ve tried out setting up wifi to connect Mission Planner on my laptop through it, but that’s a pain and not very reliable.
If you want a secondary telemetry radio and it doesn’t need to have long range, then it’s hard to beat the mRo or Holybro SiK radios. They work for telemetry back to your laptop. They are simple, and reliable. And reasonably priced. Don’t get aftermarket clones, they’re often garbage. I’ve used my mRo SiK radios to over 500m reliably. (I think I got to 800m once, but they were getting sketchy by then) Nice thing with these, is you can upload missions and get the drone going, then once you’re in flight and flying FPV, it doesn’t matter if the secondary radios drop signal. The ELRS or Crossfire radios will still be going strong. If you’re flying FPV you aren’t looking at the laptop anyhow.
Do you feel that RFD is better than Crossfire? For reliability? For latency? For range?
I’m leaning this direction because by the time I fork out the money for a separate TX module, RX, and telemetry radio TX/RX, I might as well buy a single system that will support both RC control and two-way mavlink telemetry.
Way better than crossfire. Telemetry and access point on crsf are a joke. You can forget about connecting MP on a laptop to crossfire ground module. The telemetry on yaapu after 2-300m gets really slow/spotty so definitely useless and anyway you are not going to use that when flying Fpv at distance. You are way better having a solid Mavlink channel connected on the laptop as well as a solid rc on a single unit.
At work I use the RFD900x. It’s solid, and full sized parts. But costly.
At home I use CRSF. The RX is tiny, the parts are available locally, and reasonably priced. CRSF doesn’t do the mavlink telemetry as well as RFD but it runs Yaapu just fine.
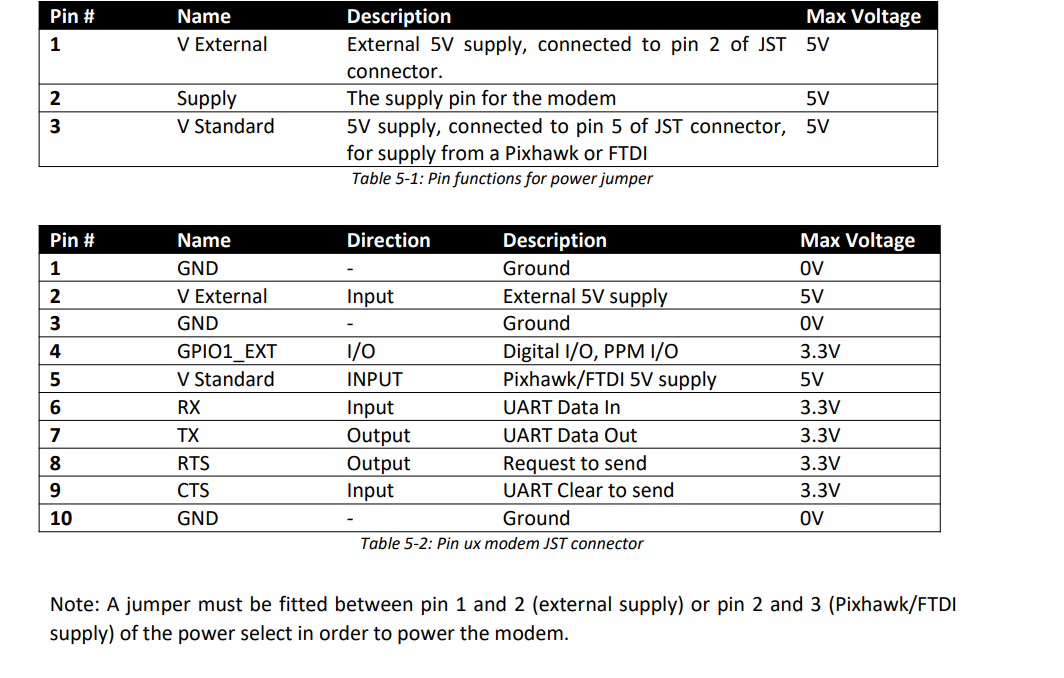
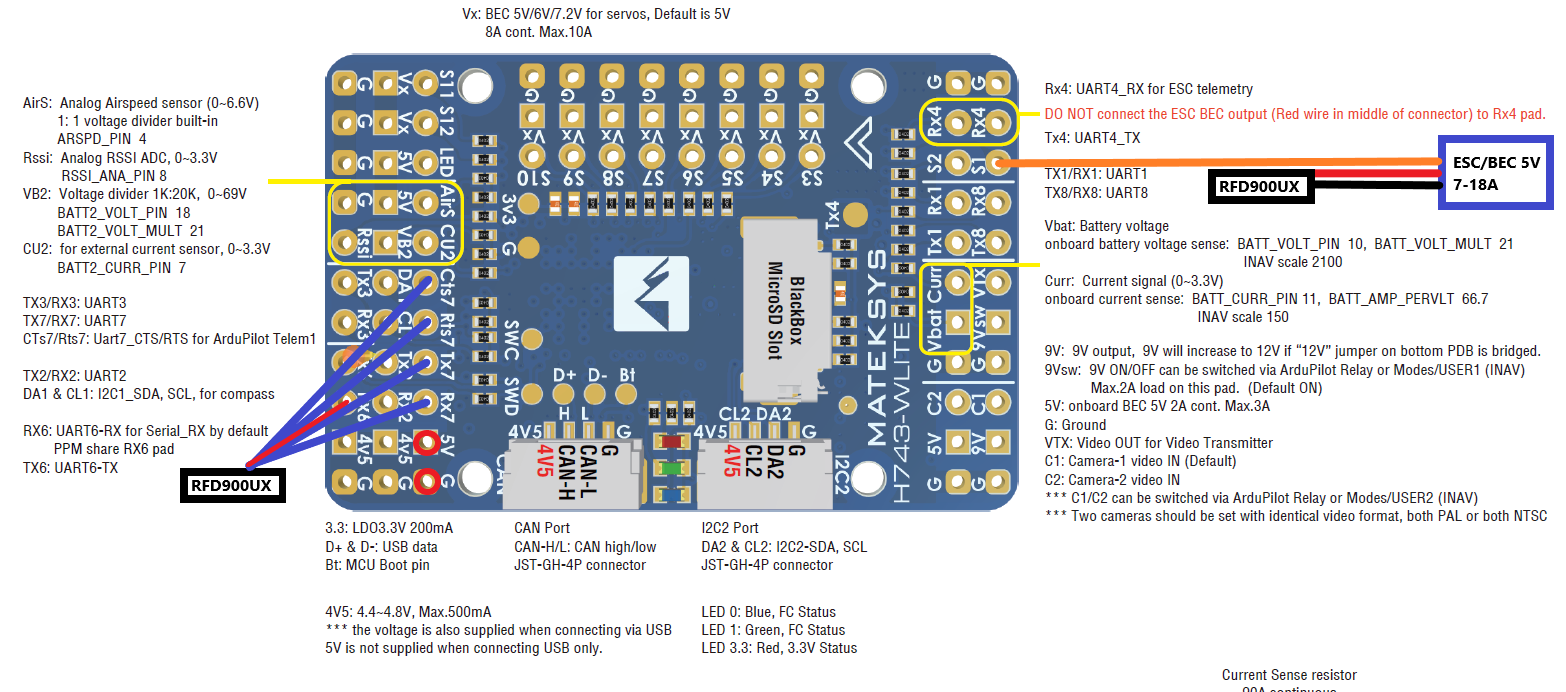
Since the BEC on my HobbyWing 60A ESC can’t be used on the FC I’m planning on getting, can I safely power the RFD with it as shown, or should I just use the FC’s 5V pin and ground rated at 2A (circled in red)?
I believe the RFD can pull up to 1A, so I’m thinking the ESC route would provide a bigger cushion.
In that scenario, will the signal wire going to the FC from the ESC be okay without connecting it’s ground (as shown)?
ETA: For RC inputs, where would I connect the digital or PPM I/O pin? To another Rx on the FC?
If I’m correct there, how would it need to be configured in MP?
If I used Rx7/Tx7/Cts7/Rts7 (maps to SERIAL1) for UART data I/O, I’m guessing Serial_1_PROTOCOL would be set to 1 for MAVLink1, SERIAL1_BAUD set to 57. Am I on the right track?
And if I take pin 4 from the RDF (GPIO1_EXT) to Rx6 (maps to SERIAL7), would I then set SERIAL7_PROTOCOL to 23 for RCIN?
If memory serves you should be able to just use the TX/RX on the RFD900. You shouldnt need the CTS/RTS lines.
The ESC/BEC is a good idea. I’ve used other power sources but I make sure to set the output power of the RFD down from 30db to 20db. Potential loss of range, but it was the trade-off for power.