I’m running Arduplane 4.0.5 on Matek F405-Wing, installed in a Bixler 3 model airplane.
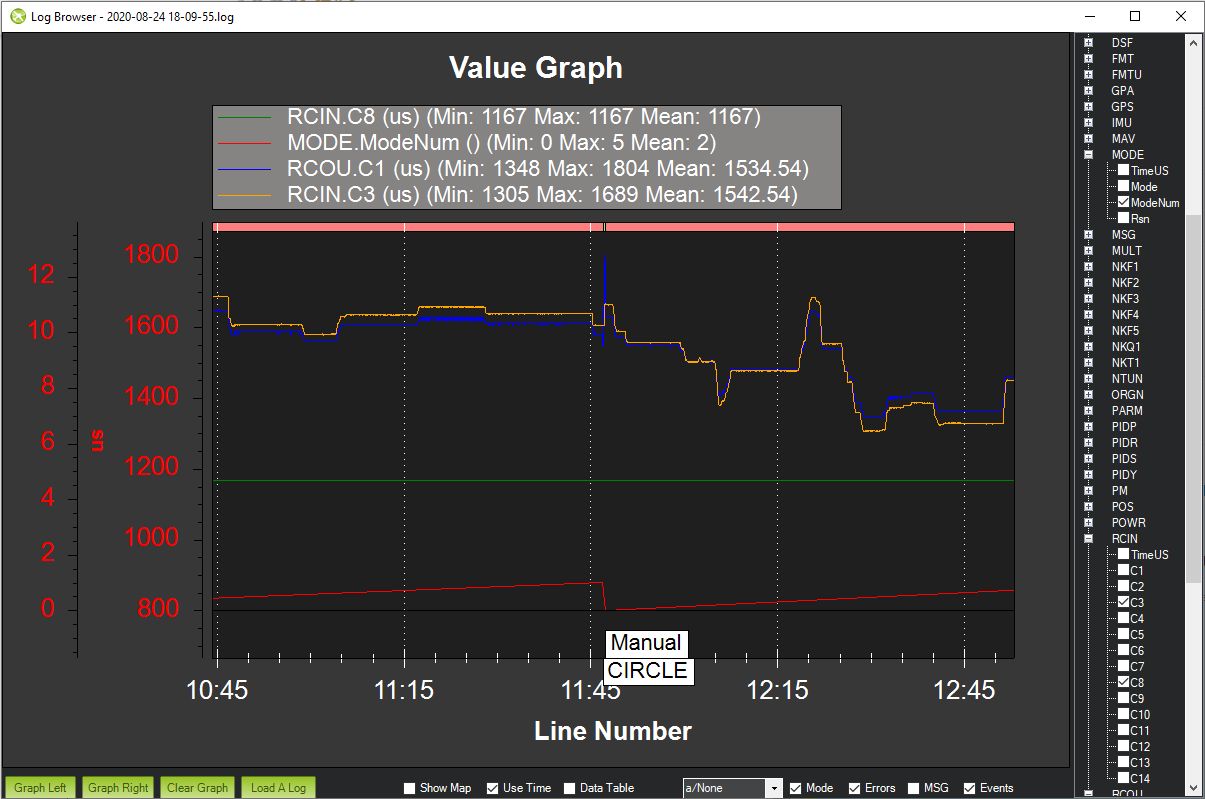
During manual flight after about 2 mins I heard a very brief and temporary rise in motor speed and afterwards I saw in the data log that Arduplane had changed the flight mode to Circle for about 0.4secs during which it increased the throttle PWM despite no change to the RC inputs for flight mode and throttle.
Also on the ground while disarmed and in manual mode the ailerons flicked over briefly for a tight turn and then went back to normal. I suspect this was also a momentary flight mode change to Circle but there are no logs for confirming this.
I had similar problem with matek 405 wing. Maybe I can help if you upload bin file of the flight.
“Also on the ground while disarmed and in manual mode the ailerons flicked over briefly for a tight turn and then went back to normal.” - I had that.
What is your receiver, what pad of FC are you using for RC signal? What power pin is used for receiver?
The log file is 20MB, is there a file size limit for uploads?
I’m using a FrSky R-XSR receiver with Sbus output connected to SBS pin on FC. Using 4.5V pin for receiver power. Doubt the receiver glitched as operating voltage is specified down to 3.5v and also the flight controller saw no RC input change for flight mode.
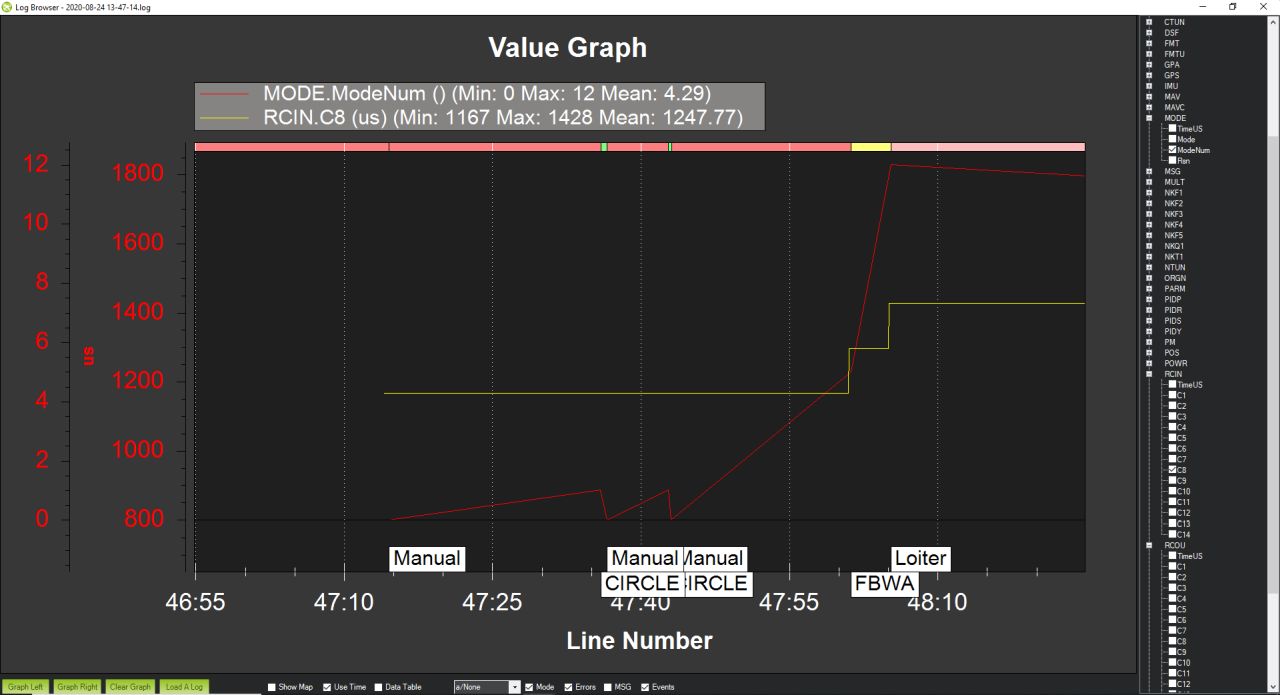
Here’s another example. The flight mode switched from manual to circle and back to manual very briefly twice in a short period of time. This was a flight earlier the same day.
Have to admit that is a surprise as the FrSky R-XSR receiver has been working well so far at a decent range while these flights were shortish range. Even have the receiver antenna routed out the fuselage in plastic straws at 90 degrees to each other.
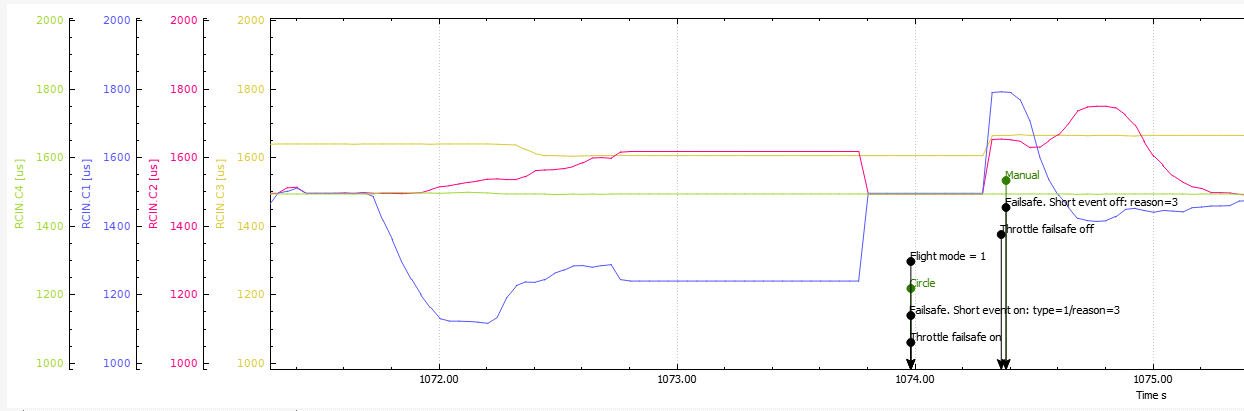
Just curious - how is failsafe communicated from the receiver to the FC across Sbus? According to my taranis the receiver is set for no pulses however the data log show channels 3 and 8 holding their values while 1, 2 and 4 are reverting to centre position.
As Eosbandi said it really was a simple failsafe. Your receiver lost signal for a moment and plane switched to Circle.
I think you have 2 separate problems, first one is just rc link loss and second one is your twitching "Also on the ground while disarmed and in manual mode the ailerons flicked over briefly for a tight turn and then went back to normal. ".
I am more interested in second one, I think it is not the receiver fault.
Next time when this flickering happens please immidiately arm the plane to start logging to see why they are doing it. I sometimes have that, still cannot solve it.
@Dmitry8266 Thank you for your help. I’ll try what you suggest. What receiver are you using?
I have a HC-06 style bluetooth module fitted which I use to connect to mission planner on the laptop. Is it possible it’s blocking out the RC signal for those brief moments? I know it’s not long range that’s causing the problem.
Would be neat if it was possible to use an RC channel to put the bluetooth module into sleep mode. That way I could disable it during flight. As an experiment I’ll just try unplugging it.
It is not the bluetooth, you don’t need to disable it.
I think it is problem with matek405wing, I already spoke about it with matek support.
I have flysky fs-ai6b receiver and I experience this servo twitching sometimes. And I am 100% sure that twitching does not come from the receiver.
One way to eliminate receiver failsafe from the issue is to monitor the SBus signal to ensure a failsafe condition is not sent from the receiver when the twitches happen. Another way would be to use an SBus generator (an arduino sketch perhaps) and use that instead of a receiver to see if the twitches still occur.