hey:)
I have a setup on the quadcopter with dual RTK for position and heading using “simpleRTK2B Pro”, “simpleRTK2B lite” and “Pixhawk cube orange” with 4.2.3 ver.
The correction is external and passes throw “Mission Planner” to the cube and then to the Ardusimple boards.
I have encountered two issues:
-
The “Mission Planner” is sending the message “PreArm: GPS 1: not health” in spite of the fact that both GPS are in “RTK Fixed” mode (see attached pic), why is that? and how can I fix that and clear the massage?
-
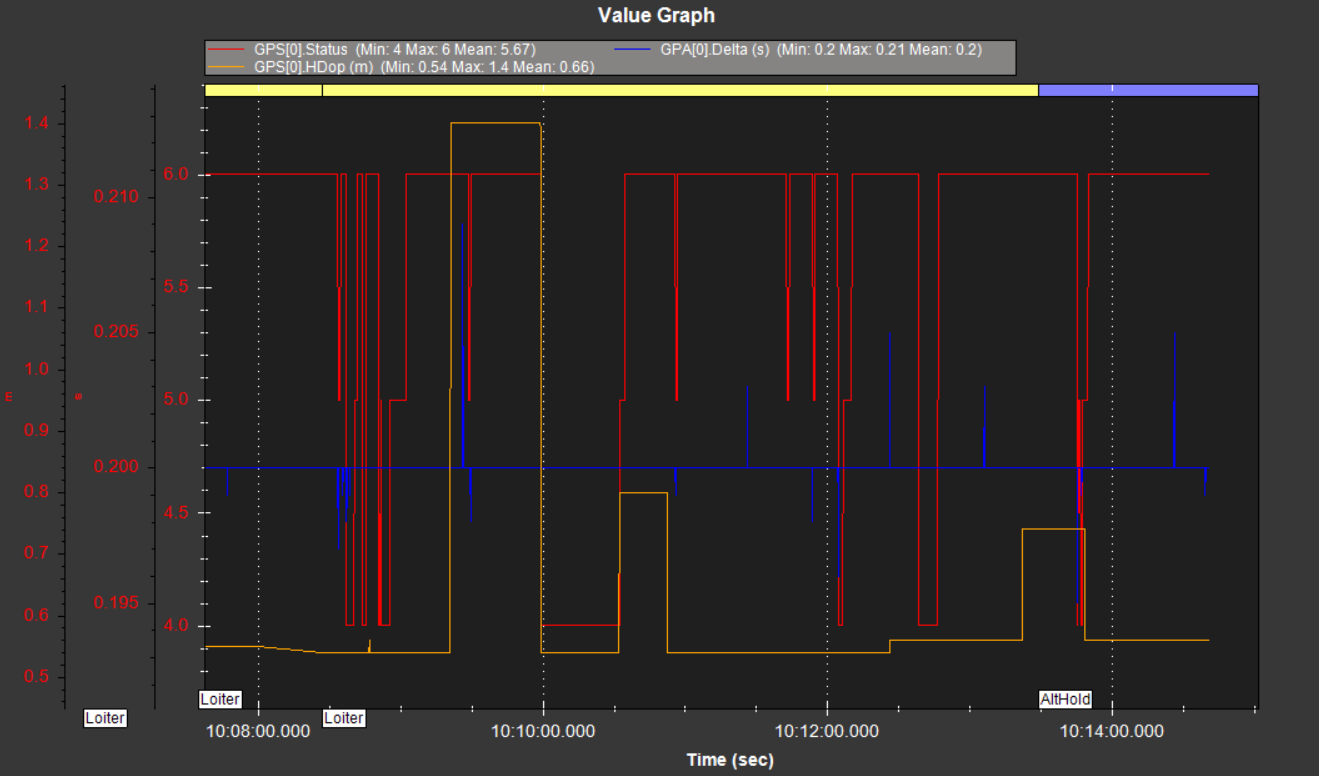
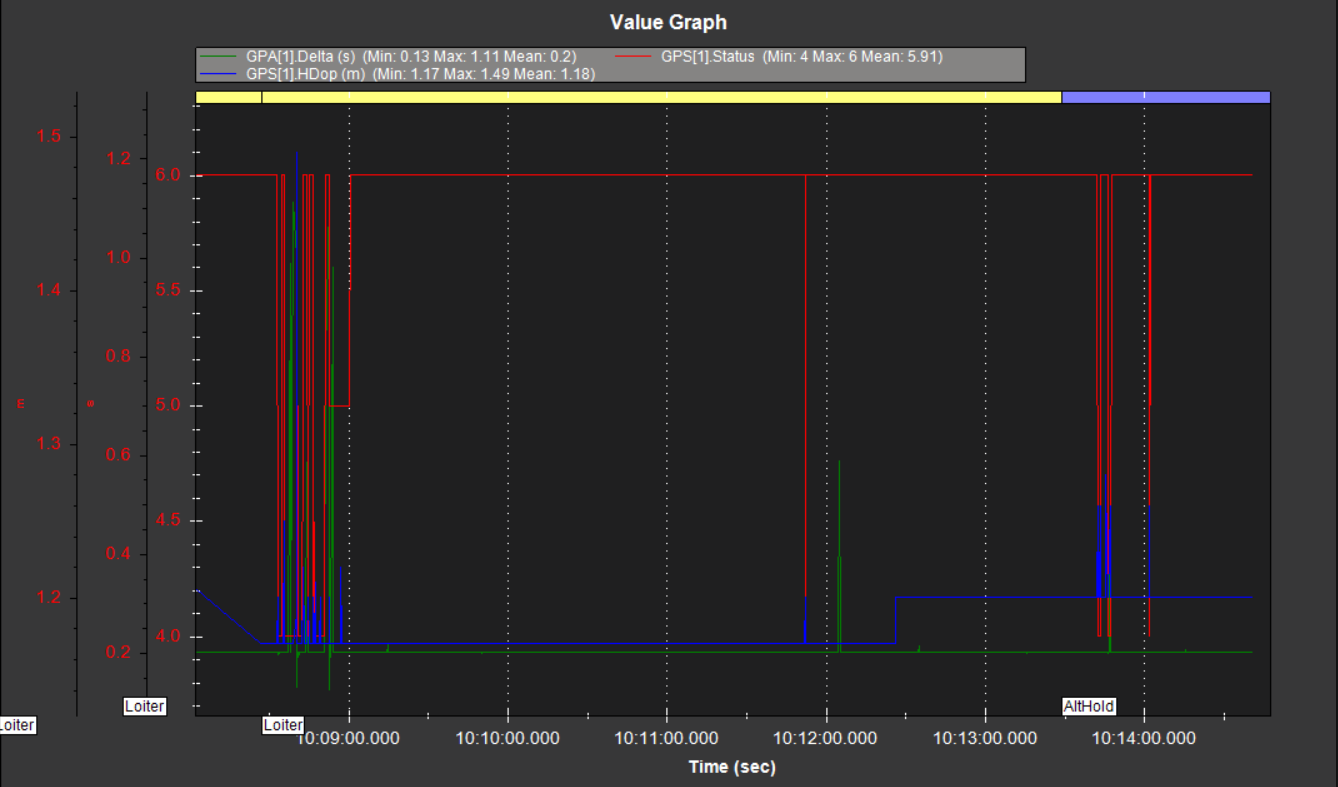
during the flight, several times one or both of the GPS changes their status to FLOT of 3DGPS, it can happen momentarily or for 3-6 seconds, what is the problem?
I have attached the link to the flight log (the flight starts at 10:08:30), the Ardusimple board configuration, and the param file of the Pixhawk cube.
https://drive.google.com/file/d/1PP5b3r9iTKBDS6NzZsl1EqD_BMLiF-FD/view?usp=sharing
I would very much appreciate the help:)