Hi,
When connect to two copters trought WiFi and one of them trought telemetry for example Copter 1, I received mixed data.
Second copter (Copter 2) send data via telemetry to GCS but first copter (Copter 1) received this data and transmits to GCS like own data.
Finally in Vehicle object exist data from another drone. To establishing a connection I’m using dronekit with pymavlink. Both copters have the latest firmware (4.2.1).
Parameter configuration
- GCS SYSID = 255
- Copter 1 SYSID_THISMAV = 1, SYSID_MYGCS = 255
- Copter 2 SYSID_THISMAV = 2, SYSID_MYGCS = 255
Additional information - When I disconnect telemetry from GCS by unplug USB cable data still mixing.
- When I disconnect telemetry from one of copters data stop mixing, but when I again connect telemetry, data start mixing again
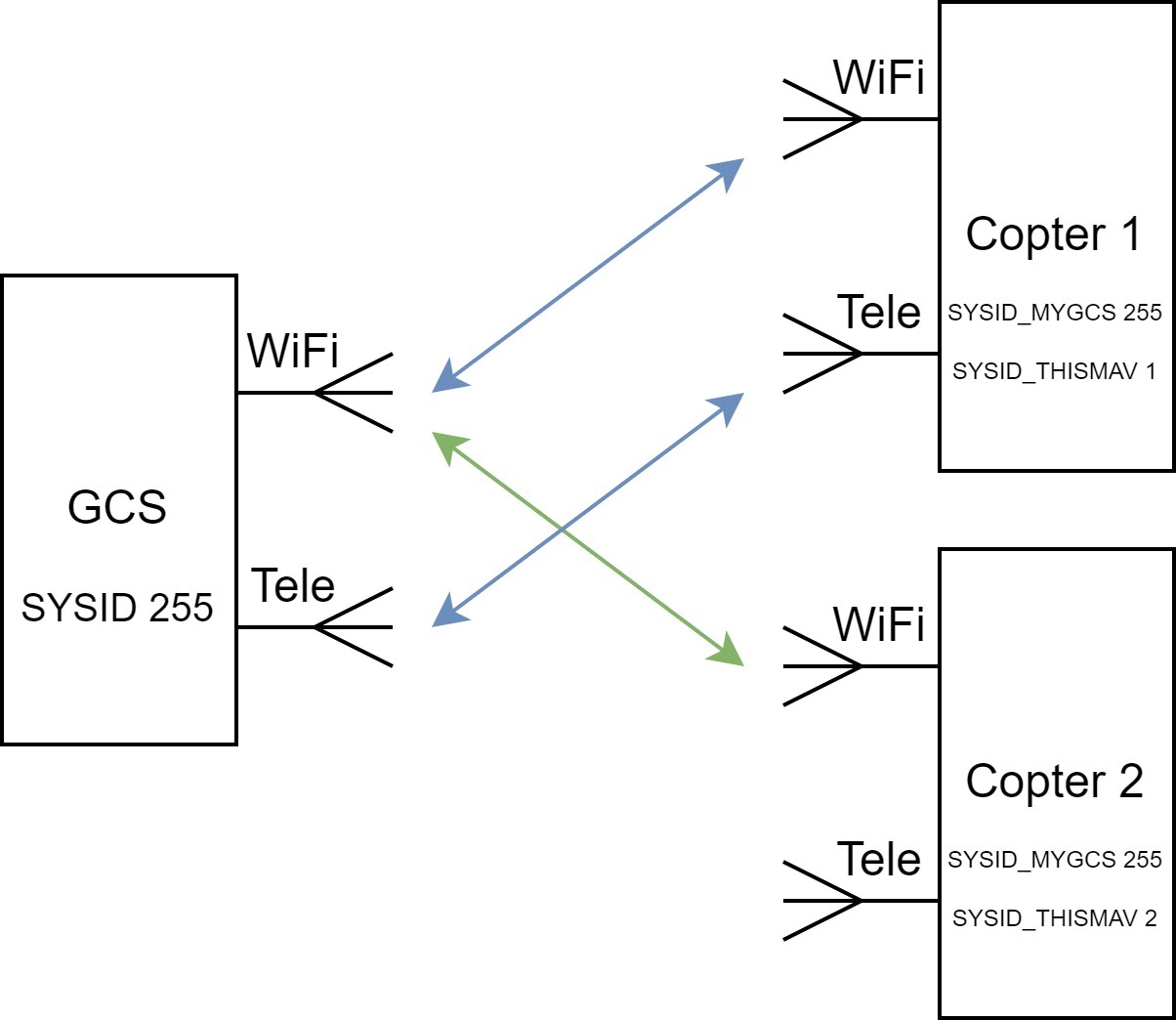
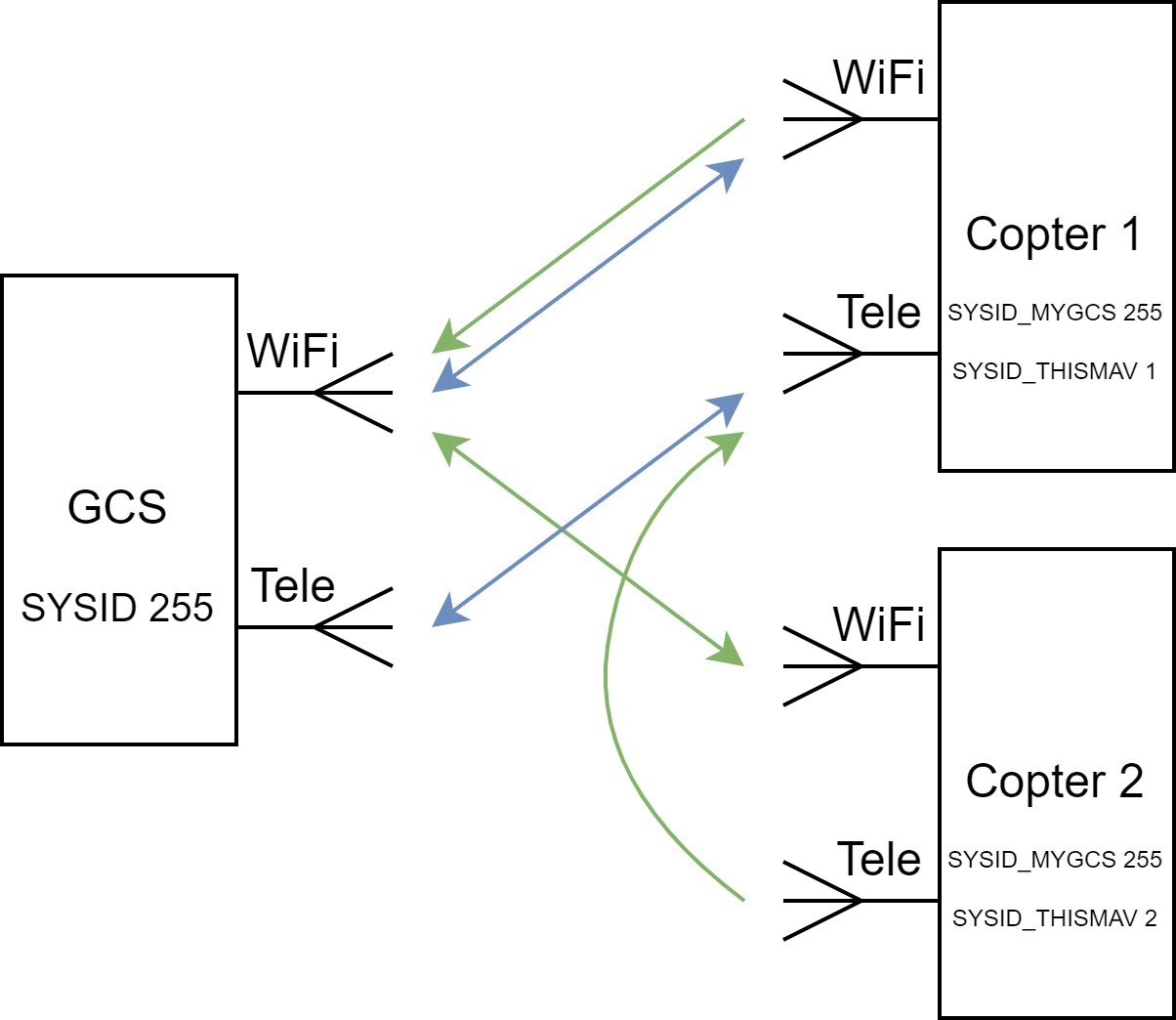
I attached two diagram to illustrate that issue. I think it’s will be helpful to understand this problem.
The blue arrows represent Copter 1 data
The green arrows represent Copter 2 data.
First diagram describe issue and the second shows the correct data flow.
Do you know this issue? Do you have any solution?
I’m using ArduCopter 4.2.1 (but doesnt work also on previous firmwares), FC MATEK H743, telemetry 915MHz HM-TRP from drotek Sik Radio 2.0 (or 2.1 but doesnt change behaviour) they has the same NetID default 25, WiFi ESP8266 module
What issues is appear in my solution:
what I need to achieve: