I tried the command export MONO_MWF_SCALING=disable
it fixed the scaling for the full list of parameters page. (see below)
but the status page still off…
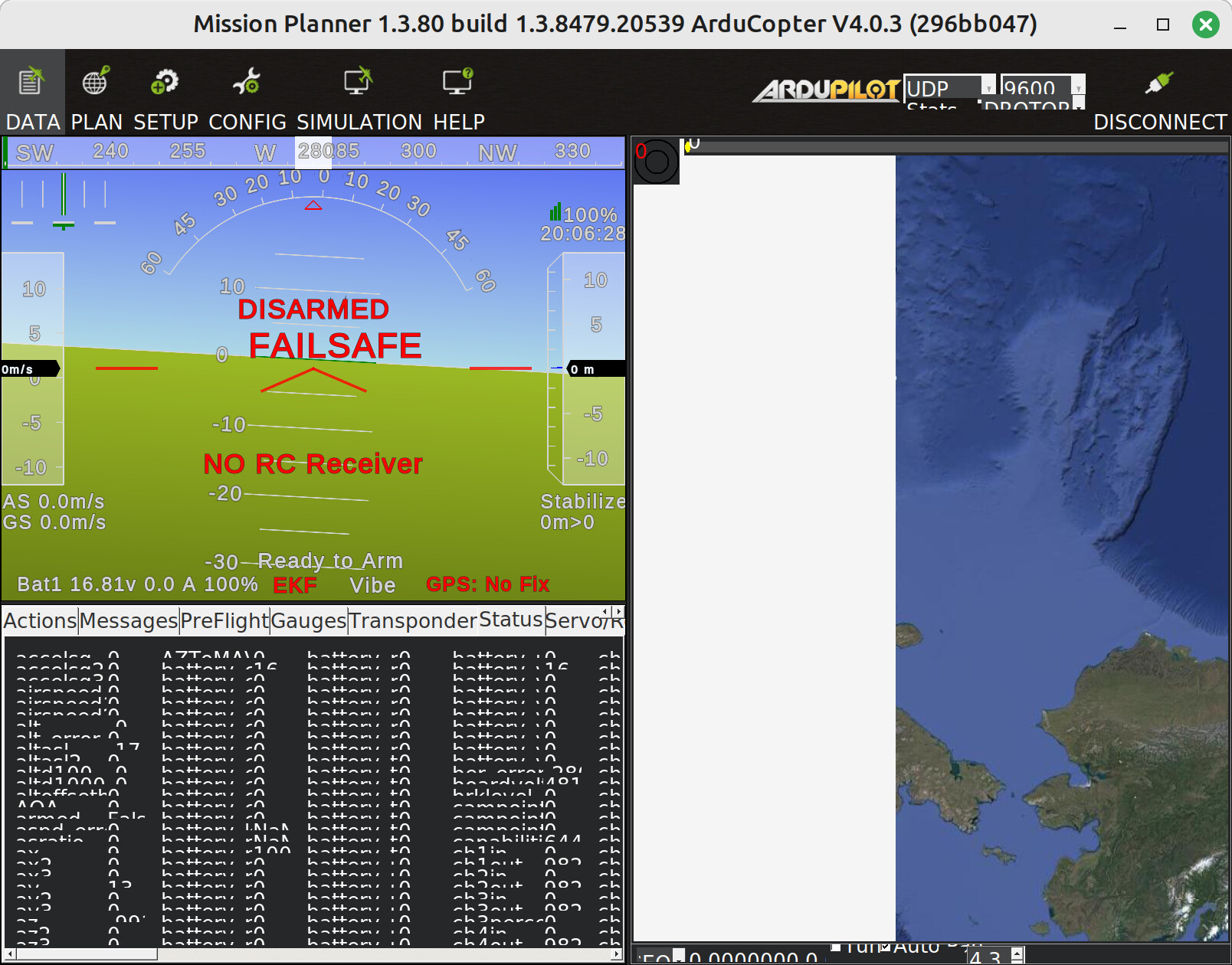
Hi, I am very new to all this but can report that MissionPlanner works just fine, as far as I can tell, on Linux Mint 21.2 under mono. I am able to connect via WiFi to my SpeedyBee 405 Wing App and it is just so much better than trying to use W10 in virtual box. The only odd thing is that quick view is always blank and the splash page has a hole: