I now have Mission Planner 1.3.41. I tried to find documentation on the ‘Waypoints’ table in Flight Plan, but have found nothing.
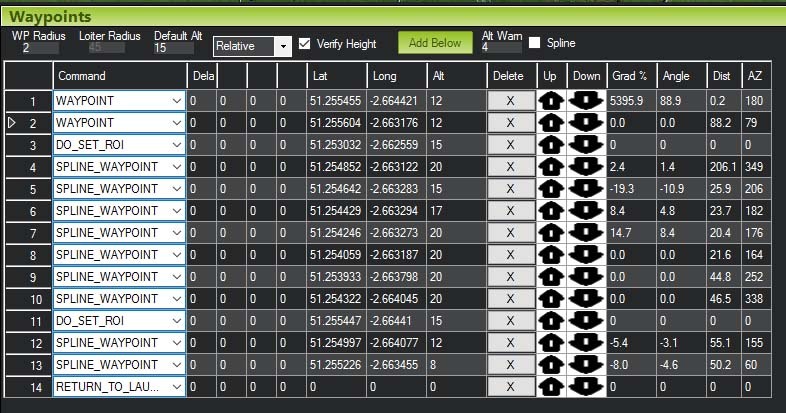
In the header there is ‘Default Alt’ which I don’t fully understand.
Next to the above is a drop down box with options: Relative; Absolute; Terrain. My question for this is: when flying a mission over terrain with distinct altitude changes, i.e, hills, which is the correct/best option to choose. Should it be ‘Relative’ or ‘Terrain’?
I have checked the ‘Verify Height’ box, which I understand does enable terrain following. Is this correct?
A clear elucidation would be really appreciated.
Thank you in advance