Dear Guys, first of all thanks for the great comments and suggestions.
All is going smoothly and we tested the spiral waypoint scheme for spraying and it worked fine!
We also had the resume mission on and during the course we took over with loiter and took the drone down. We noticed that as long as connected in loiter with spinning props, it did indeed resume mission. However when the motors stopped it was not able to resume the mission. I think this is just like the book. However, we would like to find the right settings for resuming mission after an RTL. This RTL would be triggered when tank is empty or batteries are low, then we can change batteries (we can still keep the Flight controller under power, if so needed) or refill, and then want to resume mission again. How to get that to work, where can we find instructions?
I am also looking for information to resume a mission when the tank is empty.
How do you currently manage the tank level because I tried with the PWM function with a Richenpower (RichenPower Tank level)but it does not work ?
Dear Chr, we ordered that one but did not use it. We use a low battery level together with a low tank level system going to the Power input of the Pixhawk cube, giving a fail safe message such as RTL. Our issue is to get the drone finish the mission after RTL and battery change (we can still keep the PX powered, if that is needed…There must be a way doing that …
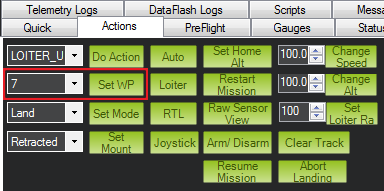
I suppose you also use Mission Planner? If you could see the index of the last waypoint before the RTL then after switching to auto in the next flight you could jump to this waypoint.
The jump you can do in “Actions” tab:
I quickly tested this with SITL for Copter v4.0.4 and seems to work. Is this more or less what you have in mind?
Out of curiosity, how do you currently do the flight planning, directly in MP or do you use some external process?
Dear Jan, great to hear, indeed use MP. So you say that I can see the last WP index in the actions tab, or is that in the flight screen (with the purple line)? And then I can manually set the Waypoint in actions tab? and then use flight controller to switch to auto again (after lifting up in loiter) and then it will continue? Does it also involve mis_restart settings?
Yes currently planning directly in MP, we use the spiral function, and that is working Ok. Is there other programs you work with? Thanks again and I will try, Winfried
Hi Gal, In the test with a 80 by 80 cm drone we did the resume. I just for the test turned off the transmitter, so it went RTL neatly. Then I took it to resume mission checked the last waypoint and clicked yes… And Amazingly it indeed started after 3 sec to resume the mission and finished it. Felt really good. becoming close to an aerial robot! We are still not in sense and avoid…But we should be getting into that . We have the 360 lidar but have to get it connected to the ardupilot. Best Winfried
So you mean to say we have to manually select the last waypoint and in the action tabs select the last way point number and select resume mission.?
If you could help this is a big help



 . Have you got the misson resume working?..Im still stuck at resuming the misson from RLT…
. Have you got the misson resume working?..Im still stuck at resuming the misson from RLT…