Update:
In SITL: Using Loiter and AltHold Modes we need to send the command rc 3 1500, otherwise the drone will land.
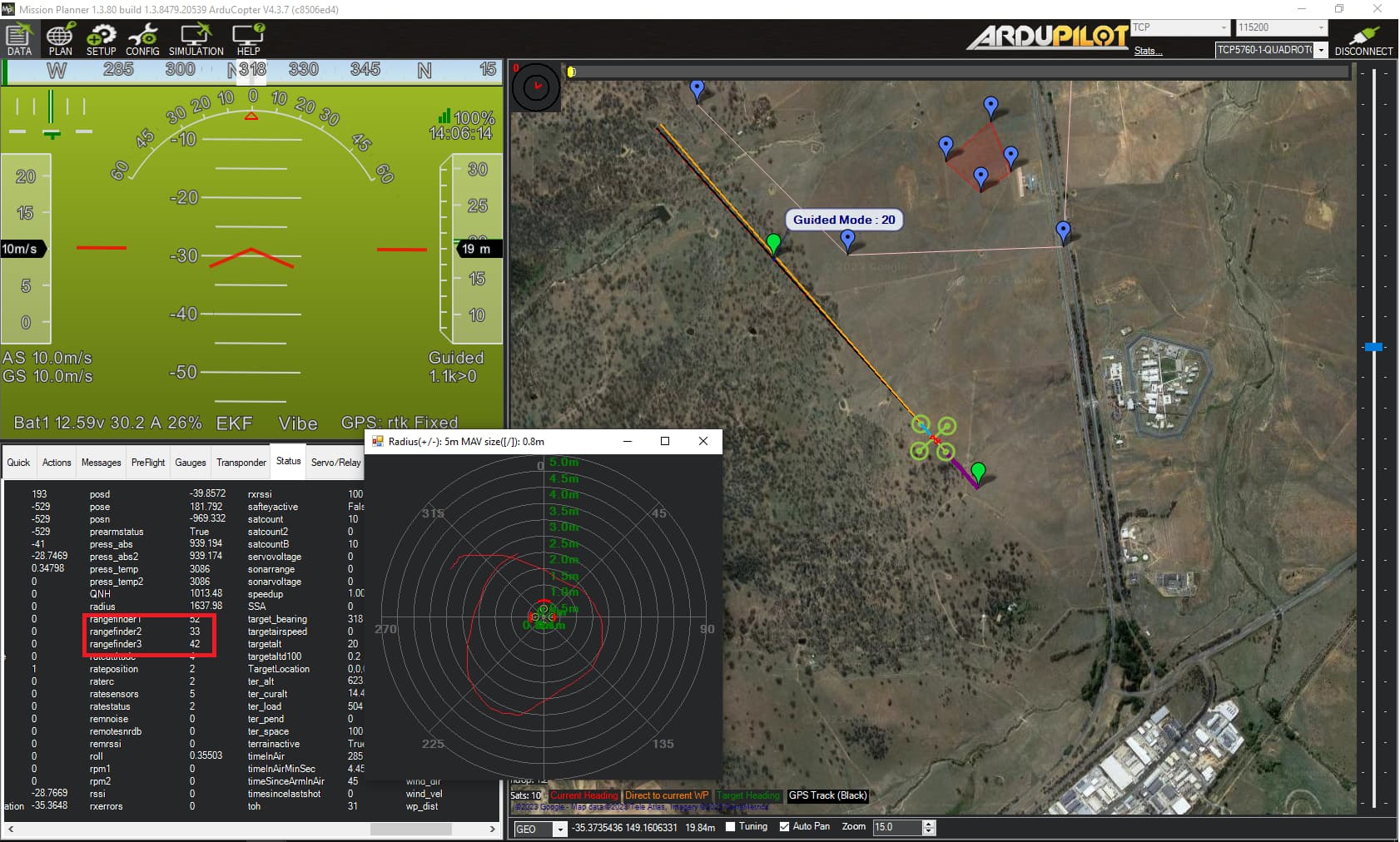
Loiter and AltHold Modes:
Arm → Take-off → send rc 3 1500 → set Loiter mode/AltHold Modes
after that the drone will stop when it detects an object using the sonars
Multirotor in SITL won’t hold alt in loiter and other modes - ArduCopter / Copter Simulation - ArduPilot Discourse
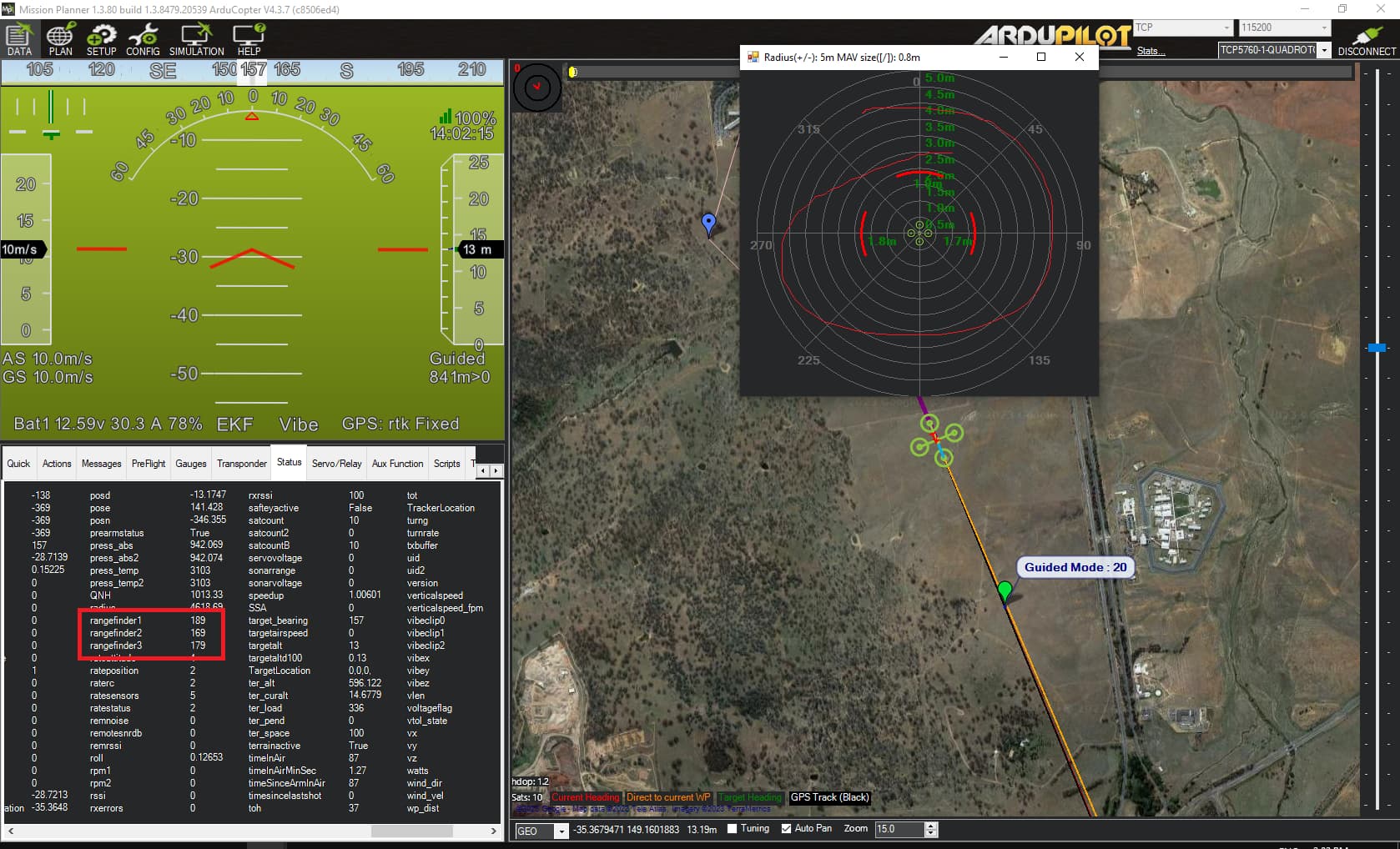
In Auto Mode, Bendy Ruler working too.
Here Logs from the experiments Loiter, AltHold and Auto(Mission) and the Params used
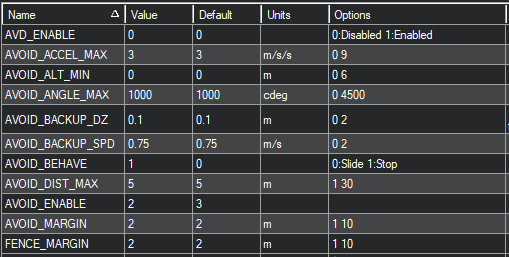
Some Important Params:
AVOID_ACCEL_MAX,3
AVOID_ALT_MIN,0
AVOID_ANGLE_MAX,1000
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_BEHAVE,1
AVOID_DIST_MAX,5
AVOID_ENABLE,2
AVOID_MARGIN,2
OA_BR_CONT_ANGLE,75
OA_BR_CONT_RATIO,1.5
OA_BR_LOOKAHEAD,2
OA_BR_TYPE,1
OA_DB_ALT_MIN,0.2
OA_DB_BEAM_WIDTH,5
OA_DB_DIST_MAX,5
OA_DB_EXPIRE,10
OA_DB_OUTPUT,2
OA_DB_QUEUE_SIZE,80
OA_DB_RADIUS_MIN,0.01
OA_DB_SIZE,100
OA_MARGIN_MAX,5
OA_OPTIONS,1
OA_TYPE,1
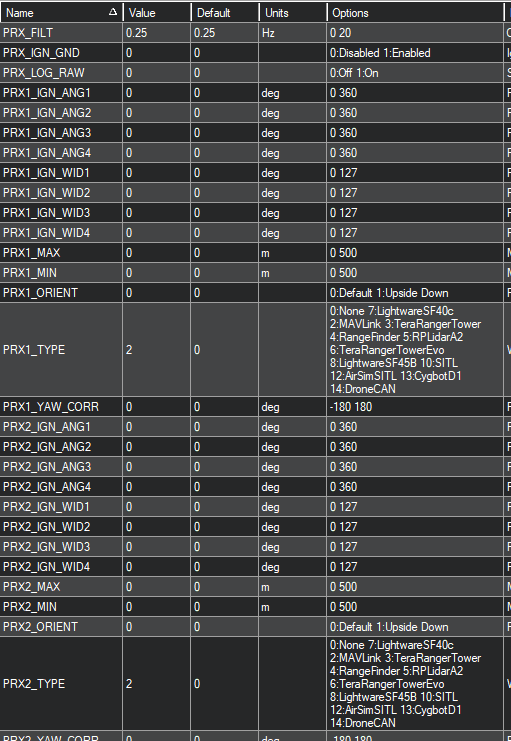
PRX_FILT,0.25
PRX_IGN_GND,0
PRX_LOG_RAW,0
PRX1_IGN_ANG1,0
PRX1_IGN_ANG2,0
PRX1_IGN_ANG3,0
PRX1_IGN_ANG4,0
PRX1_IGN_WID1,0
PRX1_IGN_WID2,0
PRX1_IGN_WID3,0
PRX1_IGN_WID4,0
PRX1_MAX,0.75
PRX1_MIN,0.2
PRX1_ORIENT,0
PRX1_TYPE,4
PRX1_YAW_CORR,0
PRX2_IGN_ANG1,0
PRX2_IGN_ANG2,0
PRX2_IGN_ANG3,0
PRX2_IGN_ANG4,0
PRX2_IGN_WID1,0
PRX2_IGN_WID2,0
PRX2_IGN_WID3,0
PRX2_IGN_WID4,0
PRX2_MAX,0
PRX2_MIN,0
PRX2_ORIENT,0
PRX2_TYPE,4
PRX2_YAW_CORR,0
PRX3_IGN_ANG1,0
PRX3_IGN_ANG2,0
PRX3_IGN_ANG3,0
PRX3_IGN_ANG4,0
PRX3_IGN_WID1,0
PRX3_IGN_WID2,0
PRX3_IGN_WID3,0
PRX3_IGN_WID4,0
PRX3_MAX,0
PRX3_MIN,0
PRX3_ORIENT,0
PRX3_TYPE,4
PRX3_YAW_CORR,0
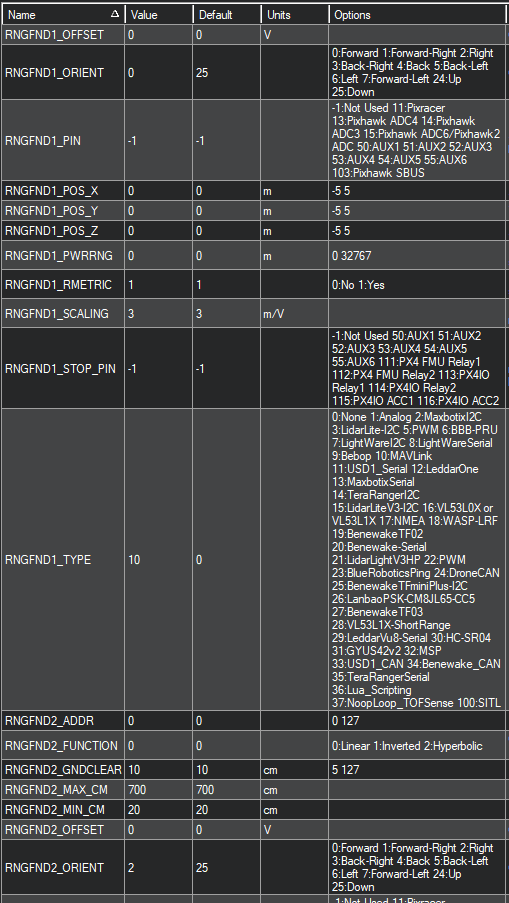
RNGFND1_ADDR,0
RNGFND1_FUNCTION,0
RNGFND1_GNDCLEAR,10
RNGFND1_MAX_CM,700
RNGFND1_MIN_CM,20
RNGFND1_OFFSET,0
RNGFND1_ORIENT,0
RNGFND1_PIN,-1
RNGFND1_POS_X,0
RNGFND1_POS_Y,0
RNGFND1_POS_Z,0
RNGFND1_PWRRNG,0
RNGFND1_RMETRIC,1
RNGFND1_SCALING,1
RNGFND1_STOP_PIN,-1
RNGFND1_TYPE,10
RNGFND2_ADDR,0
RNGFND2_FUNCTION,0
RNGFND2_GNDCLEAR,10
RNGFND2_MAX_CM,700
RNGFND2_MIN_CM,20
RNGFND2_OFFSET,0
RNGFND2_ORIENT,2
RNGFND2_PIN,-1
RNGFND2_POS_X,0
RNGFND2_POS_Y,0
RNGFND2_POS_Z,0
RNGFND2_PWRRNG,0
RNGFND2_RMETRIC,1
RNGFND2_SCALING,1
RNGFND2_STOP_PIN,-1
RNGFND2_TYPE,10
RNGFND3_ADDR,0
RNGFND3_FUNCTION,0
RNGFND3_GNDCLEAR,10
RNGFND3_MAX_CM,700
RNGFND3_MIN_CM,20
RNGFND3_OFFSET,0
RNGFND3_ORIENT,6
RNGFND3_PIN,-1
RNGFND3_POS_X,0
RNGFND3_POS_Y,0
RNGFND3_POS_Z,0
RNGFND3_PWRRNG,0
RNGFND3_RMETRIC,1
RNGFND3_SCALING,1
RNGFND3_STOP_PIN,-1
RNGFND3_TYPE,10
params_SITL.param (24.1 KB)